*仅供医学专业人士阅读参考
点击右上方“关注”, 准时接收每日精彩内容推送。
外科手术是一门精细的手艺,其中, 高质量的缝合是十分重要的技能 。绳结是外科手术的核心,在缝合时用作结扎。 绳结是缝线中最薄弱的一环,如果绳结失效,那么就会产生灾难性的后果。 手术中一个典型的并发症是 伤口裂开 ,即由此先前缝合的切口再次打开,从而阻止伤口愈合。在中线剖腹手术后的第一年内,相关的切口疝可能高达20%。在许多常见的外科手术中,使用单丝(相对于多股编织丝)进行缝合有利于降低感染风险,尽管其在机械安全性方面更具挑战性。
来自 瑞士洛桑联邦理工学院的Pedro M. Reis团队 确定了决定外科绳结力学的机理,强调了以前被忽视但却是关键的可塑性效应及其与摩擦力的相互作用 。本研究通过外科医生打结的特征揭示了绳结的紧密度和几何特征的相关范围。本研究使用与 有限元模拟相结合的模型实验 ,揭示了目标结强度相对于打结预张力、缠绕次数和摩擦特性的稳健主曲线。这些发现可以应用于外科医生的培训和机器人辅助手术设备。相关工作以题为“The strength of surgical knots involves a critical interplay between friction and elastoplasticity”的文章发表在2023年6月7日的国际顶级期刊《Science Advances》。

1. 创新型研究内容
图1A中的照片显示了一系列由外科医生用聚丙烯缝合线系住的半结。这种圆形横截面和面积A的单丝在整个研究中分别以0.25或0.49 mm的直径名称3-0和1来指代。 本研究根据单轴应力-应变测量结果确定的原样聚丙烯的屈服强度为σY = 19.1 MPa。 在图1B中,本研究用一个缝合练习垫展示了伤口裂开的传统的手术失败模式,该练习垫有三种不同松紧的缝线(S || S × S)。外侧结k1和k3比中间结k2更紧,这是通过逐渐增加σ∞量级的远场单轴应力场来对系统加载。在足够大的应力水平下,中间结k2的细丝开始滑动(图1B2 ),直到它完全滑出,这意味着缝合失效(图1B3)。在图1 C和D中,本研究展示了S || S和S × S结的光学显微镜图像(顶部),使用UTM万能试验机。本研究将绳结系在刚性3D打印针上,其具有宽度为2L = 6 mm的平坦上表面(图1E)。这种针的几何形状是根据皮肤闭合的通用规则选择的,规定针的进入点和伤口边缘之间的距离L等于组织的厚度,在人体内范围为1-4 mm。在将半结手动设置在刚性销上的松散配置中后,将细丝的两个自由端夹在UTM上。本研究通过量化滑动阻力来表征滑动结,将围绕销的环切开(图1E),将突出的滑动股(切割处细丝的末端)穿过刚性止动板的孔,如图1F中S || S结的示意图。然后,将绳结拉向该板,测量打结的滑动力F。在该模型系统中,板代表缝合系统中的被束缚组织,其中牵引可能导致伤口裂开(图1B)。
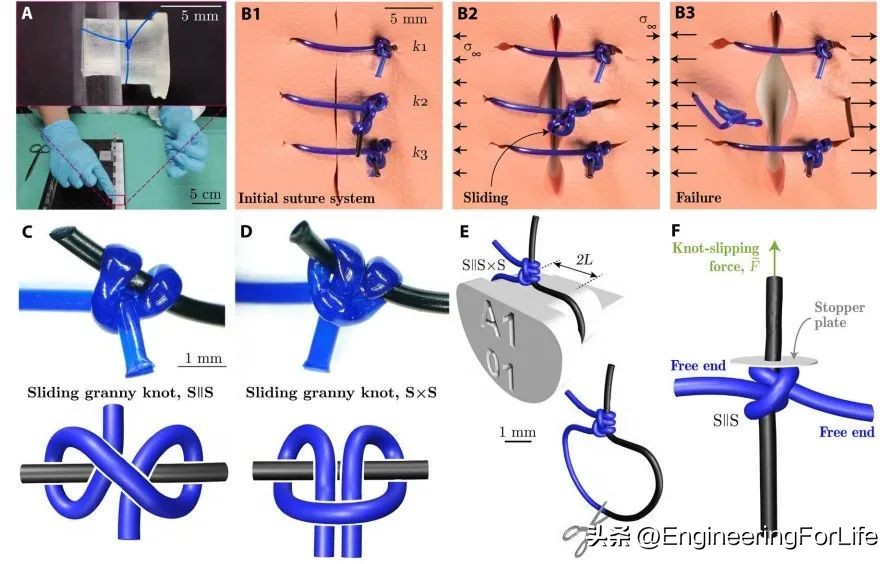
图1 手术滑结的失效
图2A显示了本研究的实验装置,其中突出(滑动)的线首先滑动通过一个扁平的刚性丙烯酸板(4mm厚)上的间隙孔。本研究以1 mm/s的恒定速度使用UTM,然后将S || S结拉向板,从而阻止垂直平移,并最终导致滑动机制(图2A1至A4)。在图2B中,本研究绘制了无量纲滑动力F~=F/(σYA)与归一化位移的关系曲线。最初,F随着垂直长丝被向上拉而增加,打结长丝受到止动板的抵抗。经过最初的瞬间,力达到平稳状态,细丝以几乎恒定的滑动力滑动。这个特征力可以无量纲地表示为F~0,其对应于结的强度,并且是结被最终解开的原因。

图2 S||S结强度的机械试验
本研究使用上述机械测试来 表征结强度F~0 ,同时系统地改变系结预张力T~和缠绕次数n。首先,本研究关注S || S × S拓扑(n = 3),每次缠绕预张力相等。T~的不同水平导致了图3A所示的三种不同的状态。本研究还关注了外科医生系的结,将它们的强度映射到上面描述的模型实验。使用与模型实验中相同的单丝、拓扑结构(S || S × S)和刚性支撑,并且指导一位有经验的外科医生手工打了38个结,最终按照常规缝合程序拉紧。手动打结的预张力水平未知(见图3C中的代表性结)。使用本研究开发的实验装置去测试外科医生打结的强度F~0,如图3D所示,在1.7< F~0<7.7的范围内显示出几乎均匀的直方图。概率分布由箱线图表示,归一化强度中值为3.2,上下四分位数分别为2.7和5.2。通过将中值结强度和四分位数范围(图3D至图3B的阴影区域)投影到S || S × S结的模型实验结果上,即可估算外科医生打结的预张力操作范围。到目前为止,本研究关注的是S || S × S结,这是一种最简单的配置,由两种滑动拓扑结构组成:S || S和S × S,然而,外科医生通常会打三个以上的半结来提高结的安全性。为了探索缠绕次数n对结强度的影响,本研究回到模型实验,研究初始S || S结后面是不同次数的非相同缠绕的结构(图3E)。本研究发现, 绳结的强度随着n的增加而增加 ,K~是前因子,本研究称之为 倍增强度因子 。在图3F,本研究绘制了K~对n的拟合值,发现线性关系K~=β1n,β1 = 0.047±0.003。
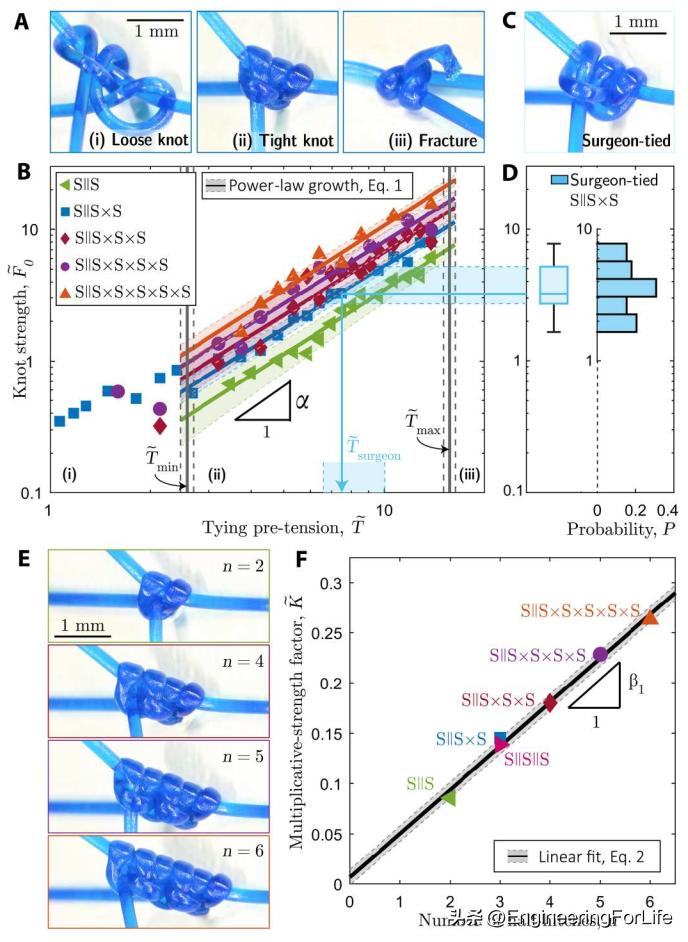
图3 结强度对预张力和拓扑结构的依赖性
在图4A中,本研究重新绘制了S || S结的实验F~0数据,实线代表图3B中相应的拟合。在同一图表中,并列了使用实验测量的运动摩擦系数μ = 0.2计算的FEM数据。实验和FEM之间的一致性增强了数值模型的可信度,并验证了σYA对力的无量纲化选择,注意所有模拟都是在假设单位直径的情况下进行的。最后,本研究利用有限元法系统地改变μ;图4A的数据表明,结强度随μ的增加而增加。放大到节点的内部工作原理,本研究使用FEM来计算半结和准直线滑动细丝之间的归一化接触压力p/σY。对于T~=9.5的S || S结(n = 2)的典型情况,图4B给出了p/σY及其投影2D图的3D可视化,后者聚焦于接触区域。本研究区分了与两个半挂接相关的两个主要接触域以及四个不同的压力集中点。对打结杆的整个表面上的局部法向力进行积分,得到积分法向接触力。它们各自的透视图如图4C所示(分别为左和右)。
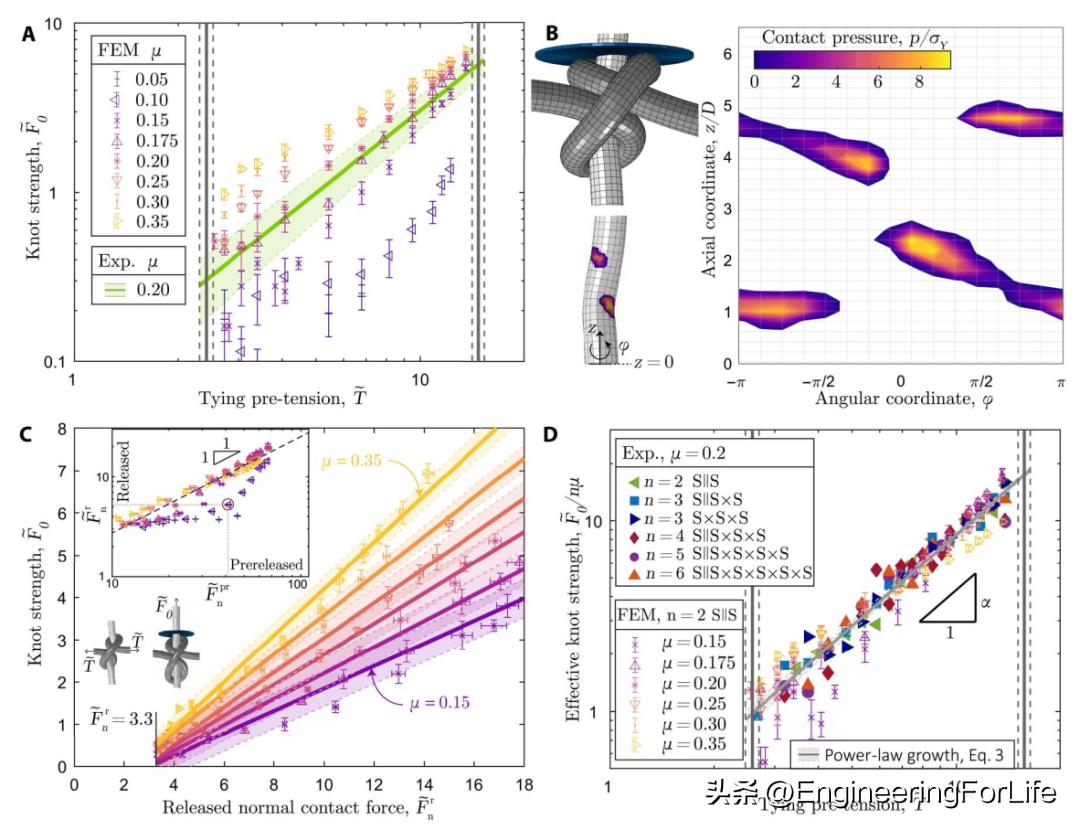
图4 表面牵引力和结强度主曲线分析
2. 总结与展望
本研究结合有限元法对外科医生打结和模型进行了实验和模拟,这使我们能够确定决定外科滑动结强度的成分。 除了拓扑结构、几何形状和弹性之外,在打结的单丝中,塑性变形和摩擦之间的相互作用也是至关重要的。本研究的发现可以转化为医学实践指南,指导如何在摩擦系数μ ≥ 015、屈服强度σY的给定缝合单丝上打一个安全的手术结。外科医生可以调整丝的口径和缠绕次数,或者控制结的预张力,以诱导适当水平的塑性变形,从而产生法向接触压力,最终通过摩擦建立所需的结强度。由于本研究只考虑干燥条件,因此有效结强度的主曲线适用于干燥的缝合环境。由于在手术过程中有液体存在时,预期会有较低的结强度,这可以通过T~和n来补偿。
本研究希望本工作能够提高有经验的外科医生对手术结中物理成分的认识,并对入门级外科医生的培训有价值。此外,本研究对滑动结潜在机制的定量描述可以应用到新兴的机器人辅助手术设备中,这些设备包含触觉反馈,以在类似于经验丰富的外科医生的水平上实现有效的打结。
了解更多
关注“EngineeringForLife”,了解更多前沿科研资讯~
