本文首发于 “江苏远恒教育”公号,订阅“江苏远恒教育”公号 ,更多精彩等你来发现~
导语:工业机器人的编程与其它的传统编程是有一定区别的,不仅要学习编程语言,熟悉指令、程序结构等知识,还需要进行点位的示教。
编程者要操作机器人到达某一个点,并修改位置,使机器人记录下来,最后机器人才能够根据你的程序和点位数据进行自动运行。所以熟练的操作机器人的手动操作非常重要,一定要熟练。

一、abb机器人运动模式简介
工业机器人手动操纵一共有三种动作模式,分别是单轴运动,线性运动和重定位运动。

三种动作模式
单轴运动: 控制机器人各轴的运动,便于改变机器人的姿态。
线性运动: 用于控制机器人在选定的坐标系空间内沿直线运动,以调整机器人的位置。
重定位运动:控制机器人围绕选定工具中心点坐标系做绕轴转运动,方便调整机器人的姿态。
二、ABB机器人单轴运动
1、 定义
abb六轴机器人是由六个伺服电机驱动六个关节轴,每个手动操作只有一个关节轴的动作,称为机器人单轴运动。

六轴机器人每个轴都可以独立运动,因此在一些特殊场合采用单轴运动来操作机器人将更加方便。
当工业机器人出现机械极限和软件极限时,通过单轴运动的操作可以使工业机器人快速移动到合适的位置。与其他手动操作方式相比,单轴运动在粗定位和大运动方面更加方便快捷。

2、应用场合
(1)把机械单元移出危险的位置;
(2)将机器人移出奇点在(奇异不能线性移动);
(3)定位机器人轴,以便进行校准。
(4)对轴进行转计数器更新
3、操作步骤
点击菜单栏,选择手动操作,动作模式,对于单轴运动,选择轴1-3或轴4-6,可分别控制轴。

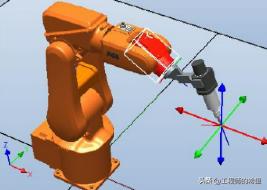
三、ABB机器人线性运动
1、定义
机器人的线性运动是安装在机器人第六轴法兰上的工具 TCP 在空间中沿直线运动,运动范围小,适合于更精确的定位和运动。
2、应用场合
(1)移动幅度较小;
(2)需要精准定位;
(3)需在某个基础点上确定其他目标点时。
3、操作步骤
点击菜单栏,选择手动操作,动作模式,选择线性运动,利用手摇柄操作。

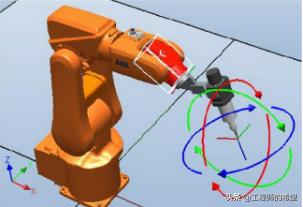
四、abb机器人重定位运动
1、定义
所谓重定位就是机器人围绕所选工具 TCP 的一个轴旋转,在旋转过程中保持工具 TCP 点的绝对空间位置不变,最终实现机器人端部执行器位置和姿态的变化。
2、应用场合
(1)检验新创建的工具TCP点是否准确;
(2)需要在确实目标点的基础上调整机器人的姿态。
3、操作步骤
(1)点击菜单栏,选择手动操作,动作模式,选择重定位运动;
(2)点击坐标系,选中工具;
(3)点击工具坐标,选择正在使用的工具tool。
(4)按下使能按钮,控制手摇柄,操作机器人进行重定位运动。



结语:看完之后,大家赶紧打开robotstudio软件操作一下吧!熟悉一下示教器手动操作界面,掌握一下单轴、线性、重定位运动的操作!下一章我们会带大家了解机器人的维护与保养,欢迎大家关注我们一起学习、进步!