EPSON
RC170/RC180控制器标配了24位输入和16位输出,用户可以通过安装I/O板卡扩展I/O位数。每张I/O板卡包括32位输入和32位输出,最多可以安装4张I/O板卡,既最多可增加128位输入和128位输出。
1硬件连接
1.1 输入电路:输入电压范围: + 12 ~24V ±10%
ON 电压: + 10.8V(最小)OFF 电压: + 5V(最大)
输入电流: 10mA,24V输入时,典型值
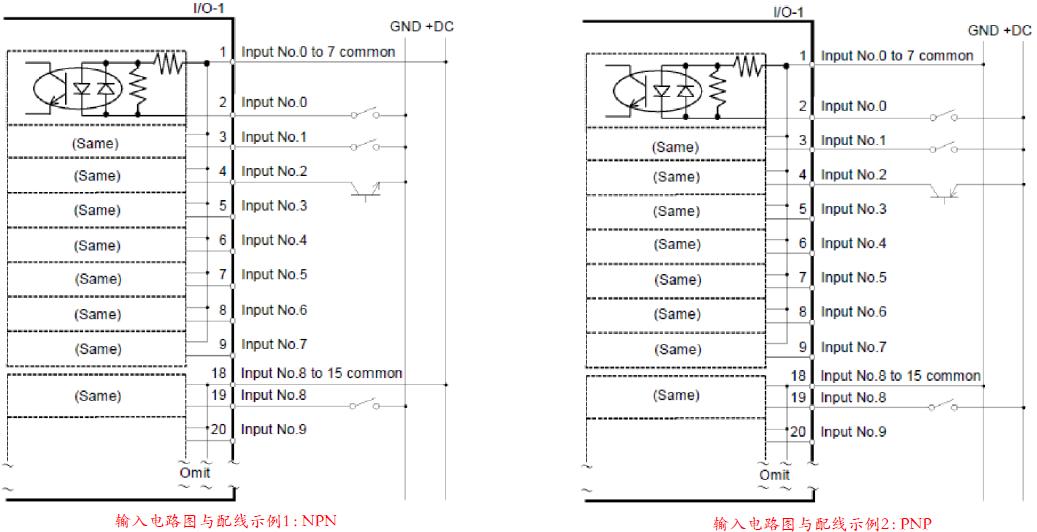
IO输入点位
1.2 输出电路
额定输出电压: + 12 ~24V ±10%
最大输出电流::100mA(典型值)/1输出
输出驱动器::Photo Mos继电器
通态电阻(平均)::23.5Ω以下输出
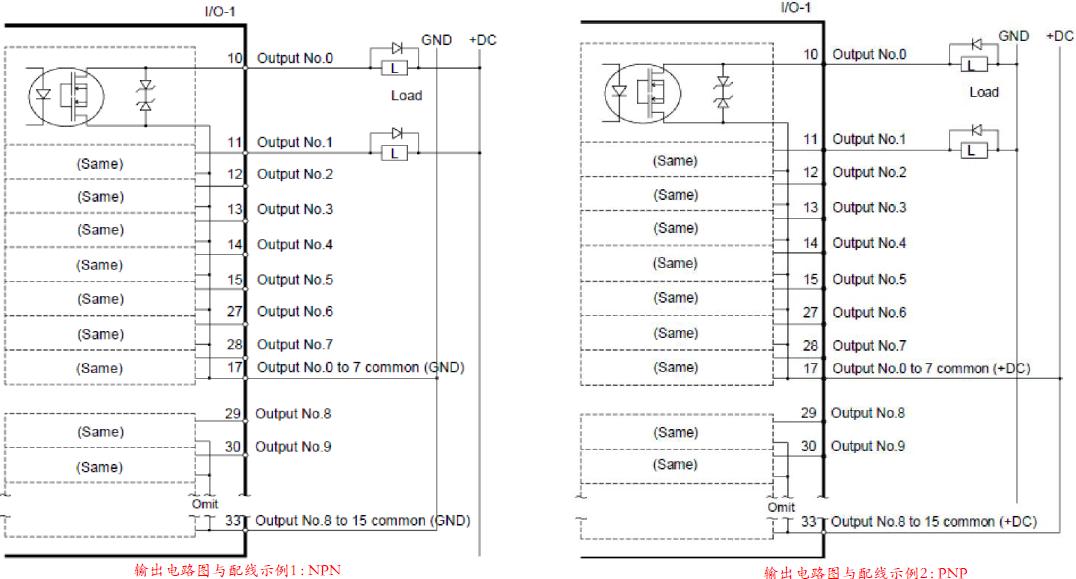
IO输出点位
2 输出指令
On
功能:打开指定输出位
格式:On 输出位编号, [时间], [非同步指定]
输出位编号:可使用的输出位编号;时间:以秒为单位,最小有效位为0.01秒;非同步指定:0或1
说明:[非同步指定]在[时间]指定时可以指定,功能如表1 示
示例:1. On 1
2. On 1,0.5,0

表1
Off
功能:关闭指定输出位
格式:Off 输出位编号, [时间], [非同步指定]
输出位编号:可使用的输出位编号;时间:以秒为单位,最小有效位为0.01秒;非同步指定:0或1
说明[非同步指定]在[时间]指定时可以指定,功能如表1 示
示例:1. Off 1
2. Off 1,0.5,0
2 输出指令
Out
功能:同时设定输出8个输出位
格式:Out 端口编号,输出数据
端口编号:构成可使用输出位的组;输出数据:用端口编号指定的组的输出模式
说明:端口编号与输出数据的组合后同时设定8个输出位。输出位8位1组。首先在用端口编号指定的组中
指定输出数据参数*特中**定的输出模式。输出数据参数用10进制数(0~255)或16进制数(&H0~
&HFF)指定。端口编号如下与位编号对应。
端口编号位编号
0 0-7
1 8-15
2 16-23
... ...
63 504-511
示例:
Out 0, 0 ´将0~7位全部关闭
Out 1, 255´将8~15位全部打开
Out 0, 100´将2,5,6位全部关闭
Out 0, &H64 ´将2,5,6位全部关闭
3 输入指令
Wait
功能:时间等待或输入位等待
格式:Wait 时间
Wait 输入条件,[时间]
时间:0~2147483,最小有效位为0.01秒;输入条件:记述待机条件
说明:只指定时间时,指定时间待机后执行下一个命令。只指定输入条件式时,待机至条件成立。指定输入条
件与时间时,条件式成立或指定时间到都会执行下一个命令。使用Sw函数,可以确认输入条件式是否成
立,或指定时间是否已到。
示例:Wait 1.5 ´待机1.5秒后,继续执行程序
Wait Sw(3)=On ´待机直到输入位3开启
Sw函数
功能:返回指定的输入位状态
格式:Sw (输入位编号)
输入位编号:可以使用的输入位编号
说明:进行I/O输入的状态确认。指定的输入打开时返回「1」,关闭时返回「0」。
示例:Print Sw(3)´打印输入位3的状态
Wait Sw(1)=On and Sw(2)=On ´待机直到输入位1和2开启
Wait Sw(1)=On or Sw(2)=On ´待机直到输入位1或2开启
In函数
功能:返回指定的输入位端口
格式:In(端口编号)
端口编号:构成可以使用输入位的组
说明:可同时确认8个输入位的值。可以使其待机直到2个以上的I/O位的状态在特定的条件下一致。
返回值为0~255范围的整数值。
示例:Print In(0)´打印输入位3的状态
Wait In(0)=0 ´待机到0~7位全部关闭
Wait In(0)=255 ´待机到0~7位全部开启