简单机械16个经典模型
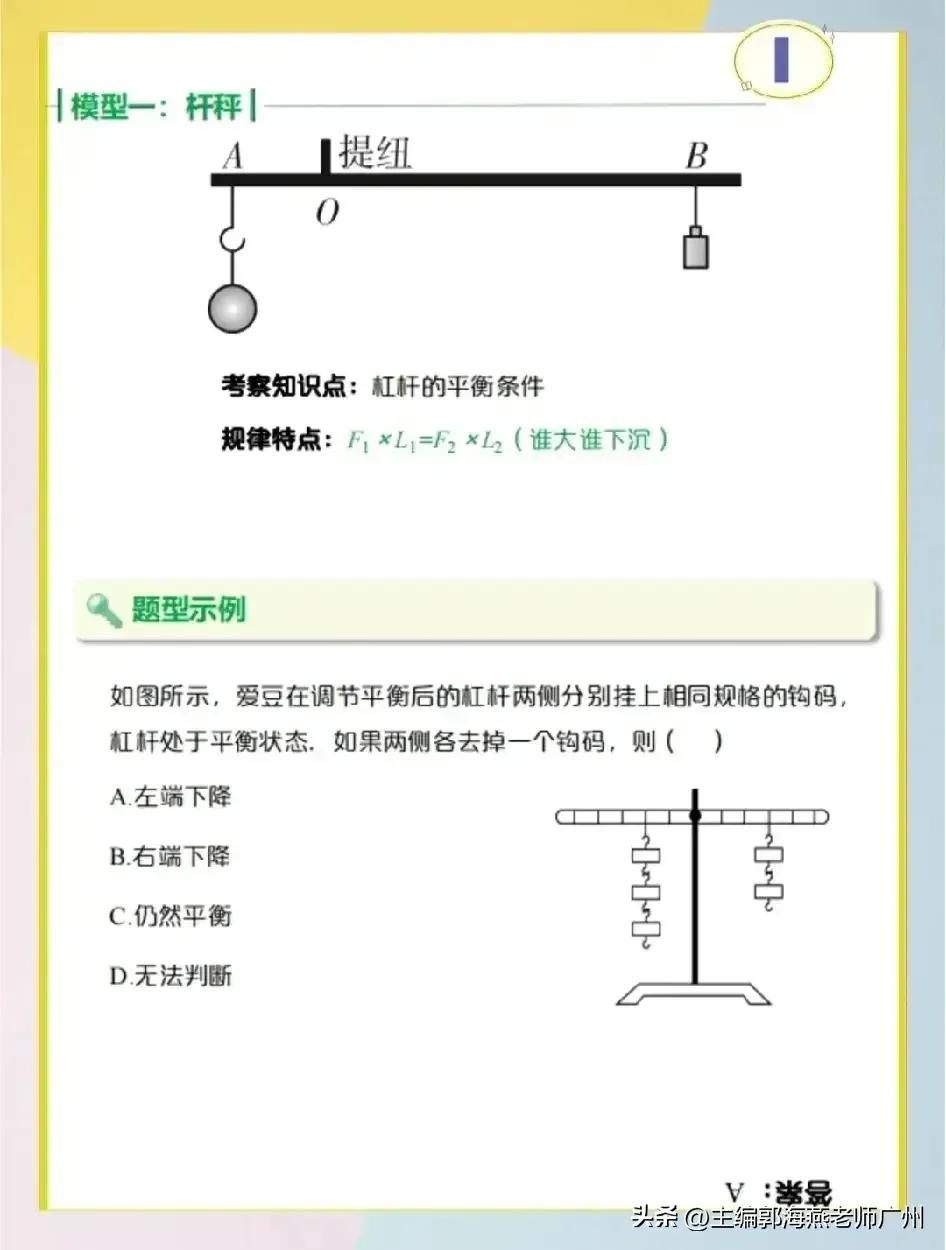
模型1:杆枰
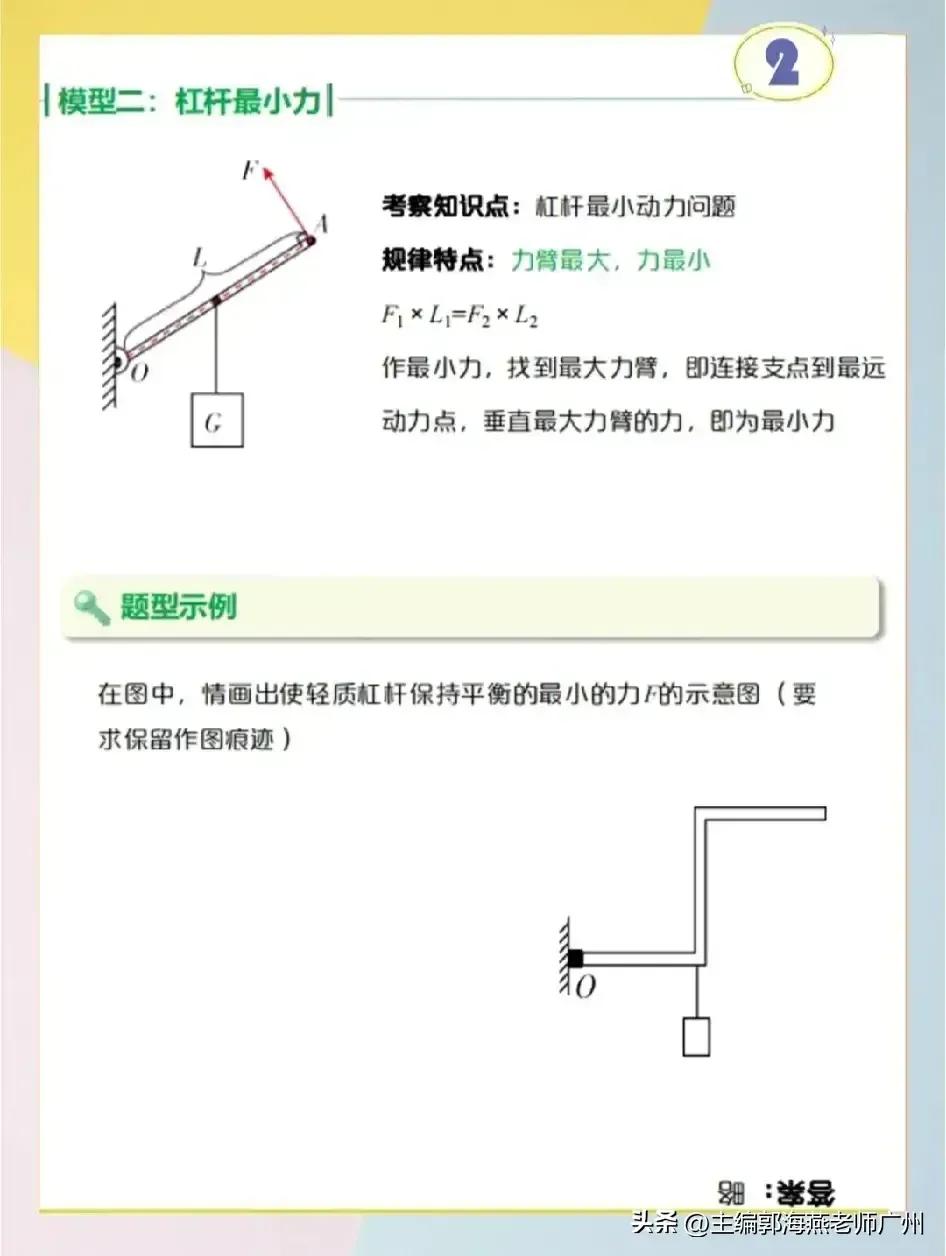
模型2:杠杆最小力
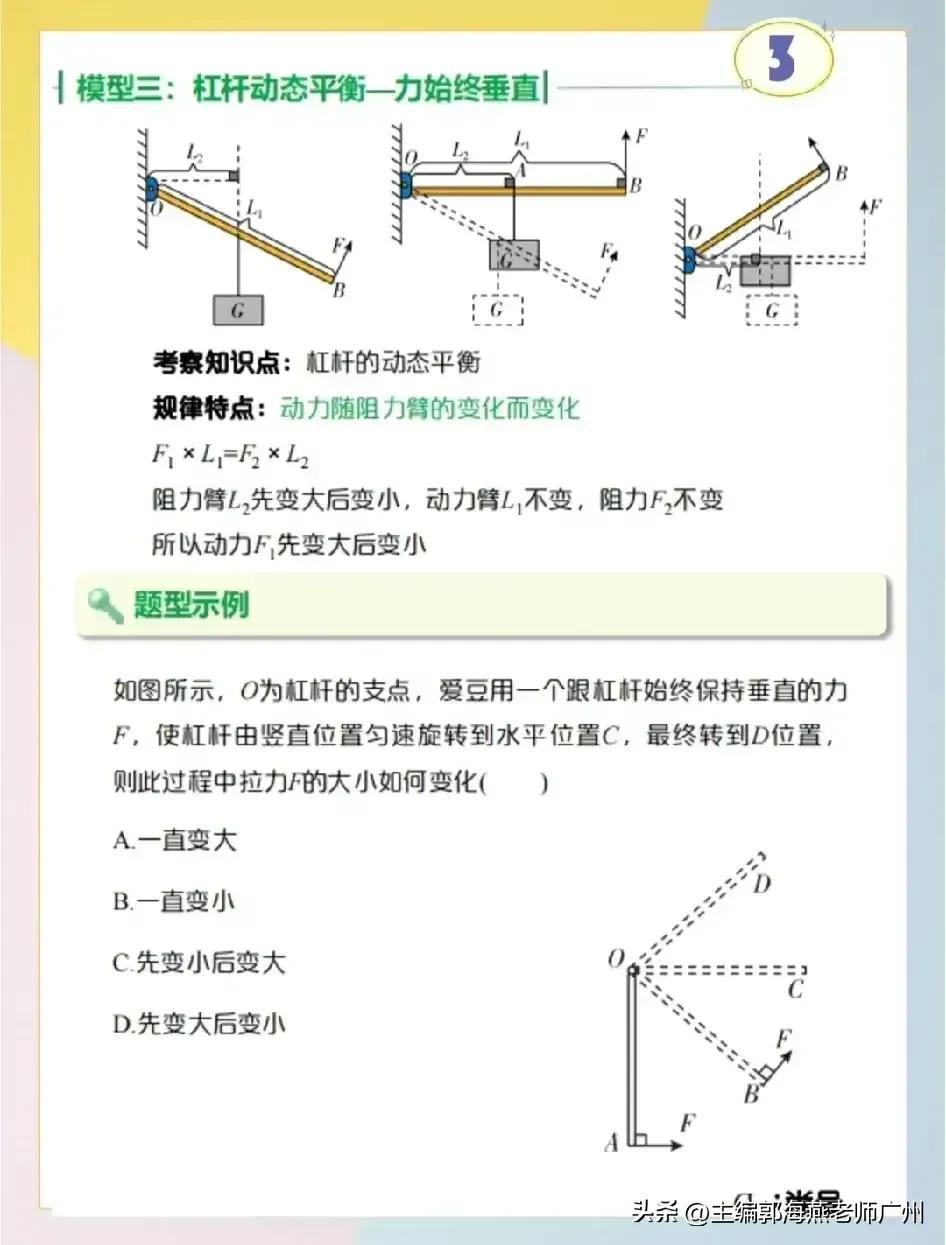
模型3:杠杆动态平衡_力始终垂直
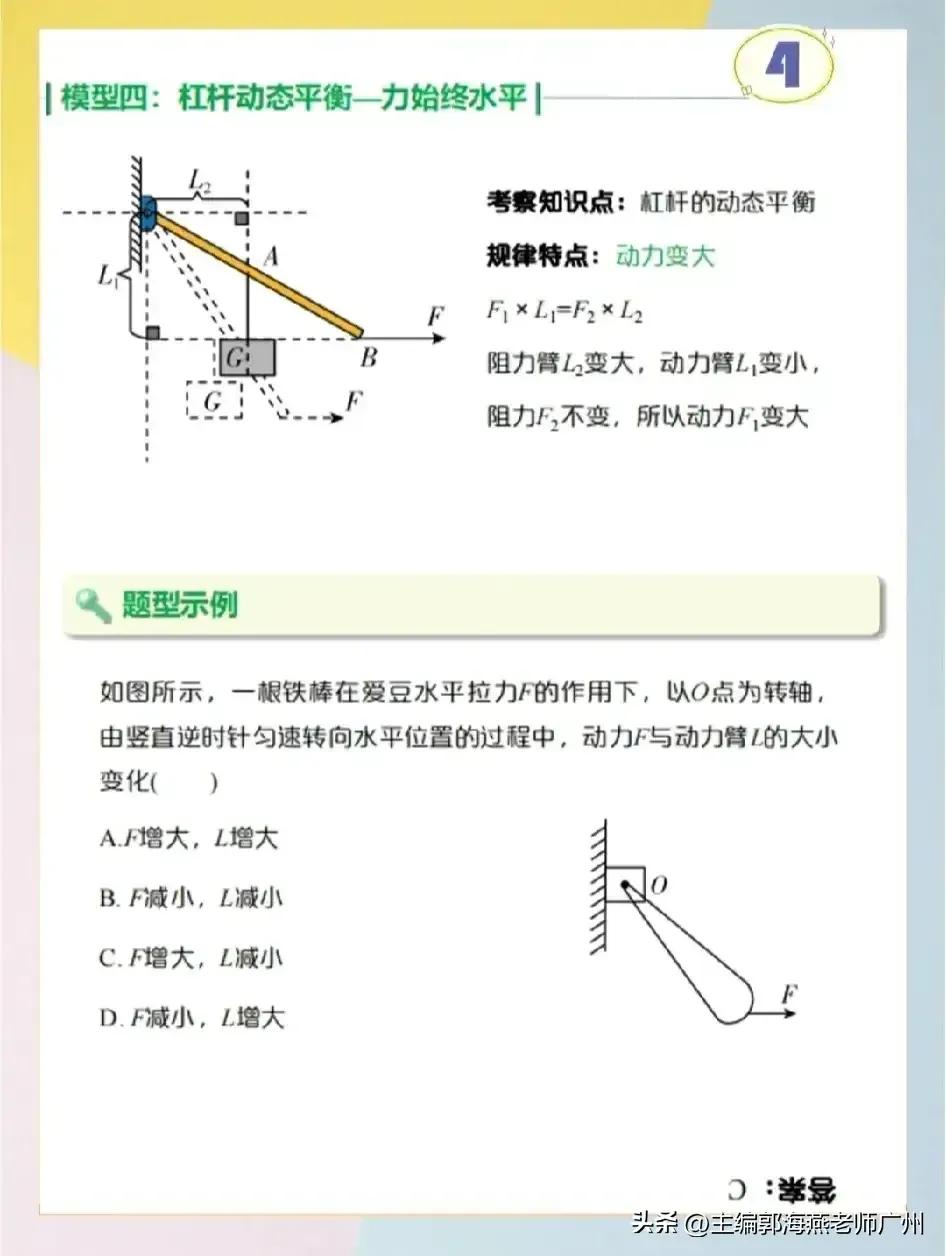
模型4:杠杆动态平衡
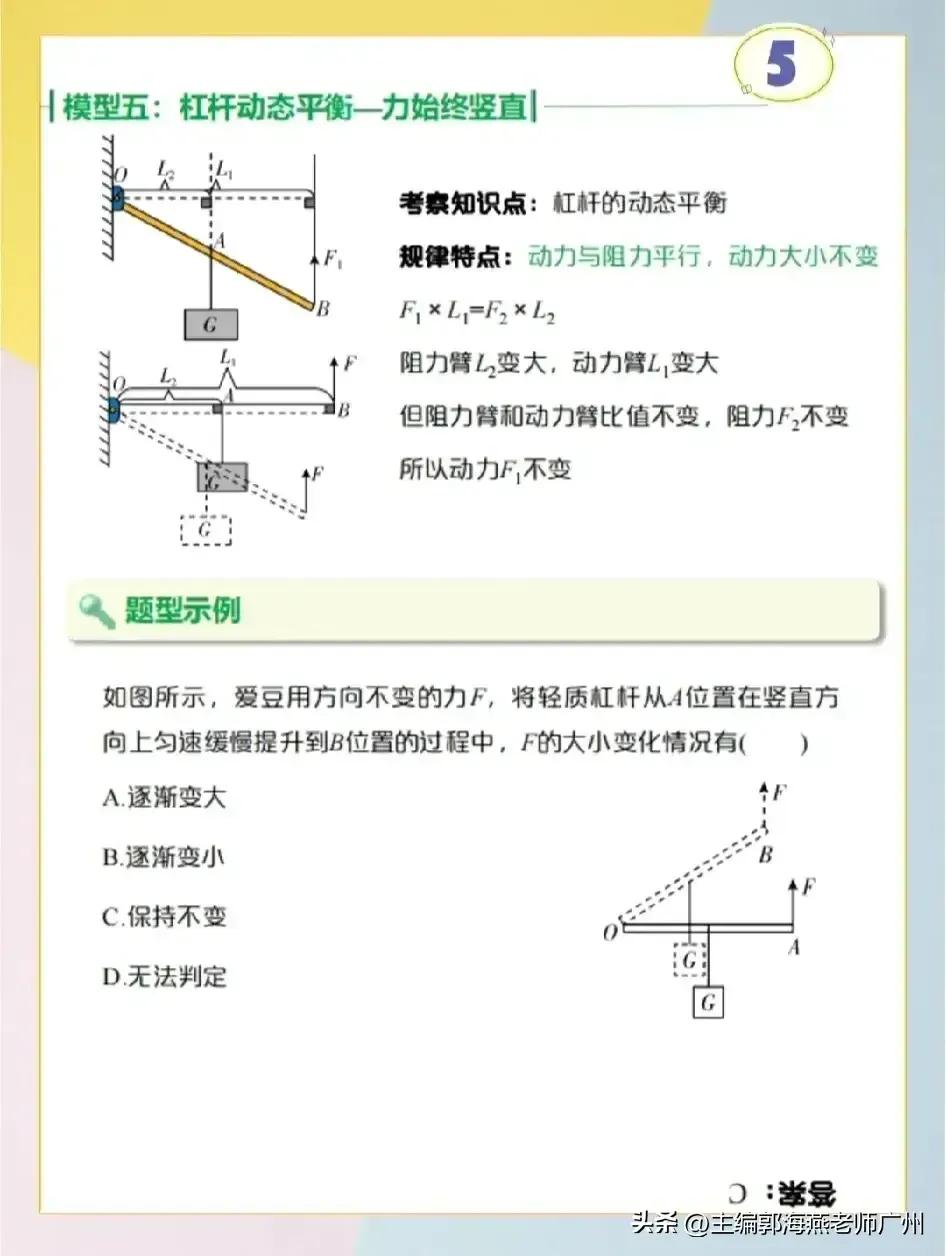
模型5:杠杆动态平衡
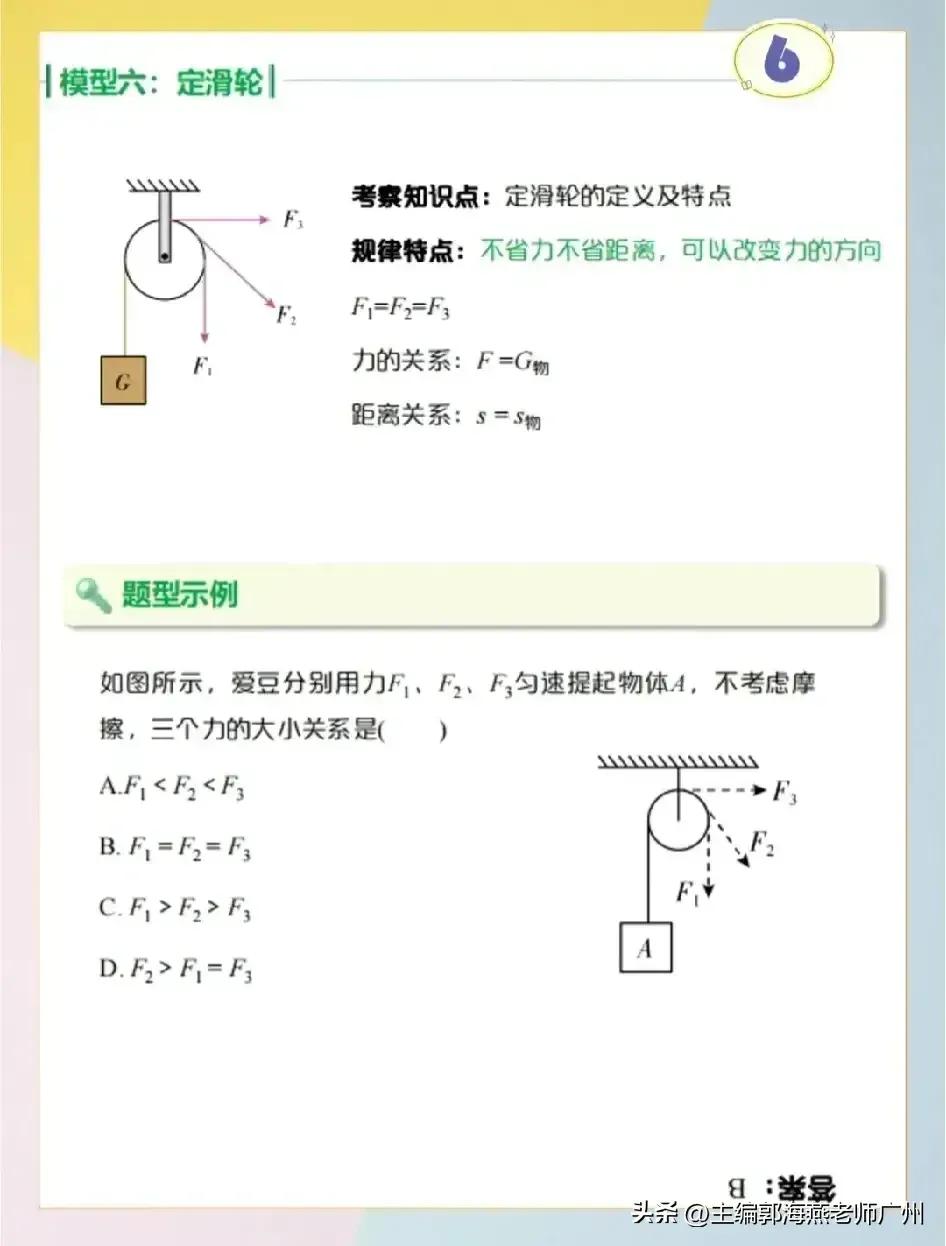
模型6:定滑轮一
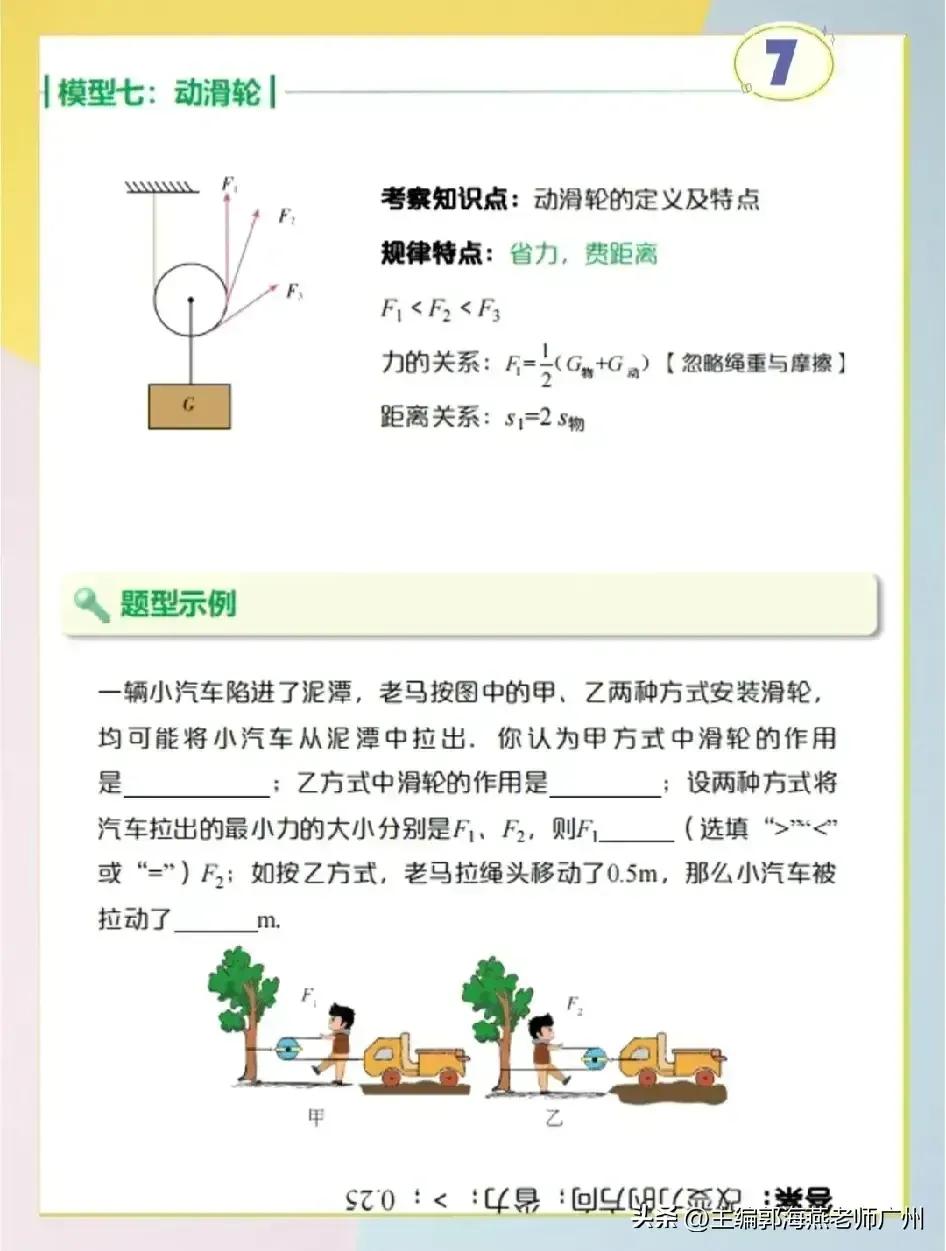
模型7:定滑轮二
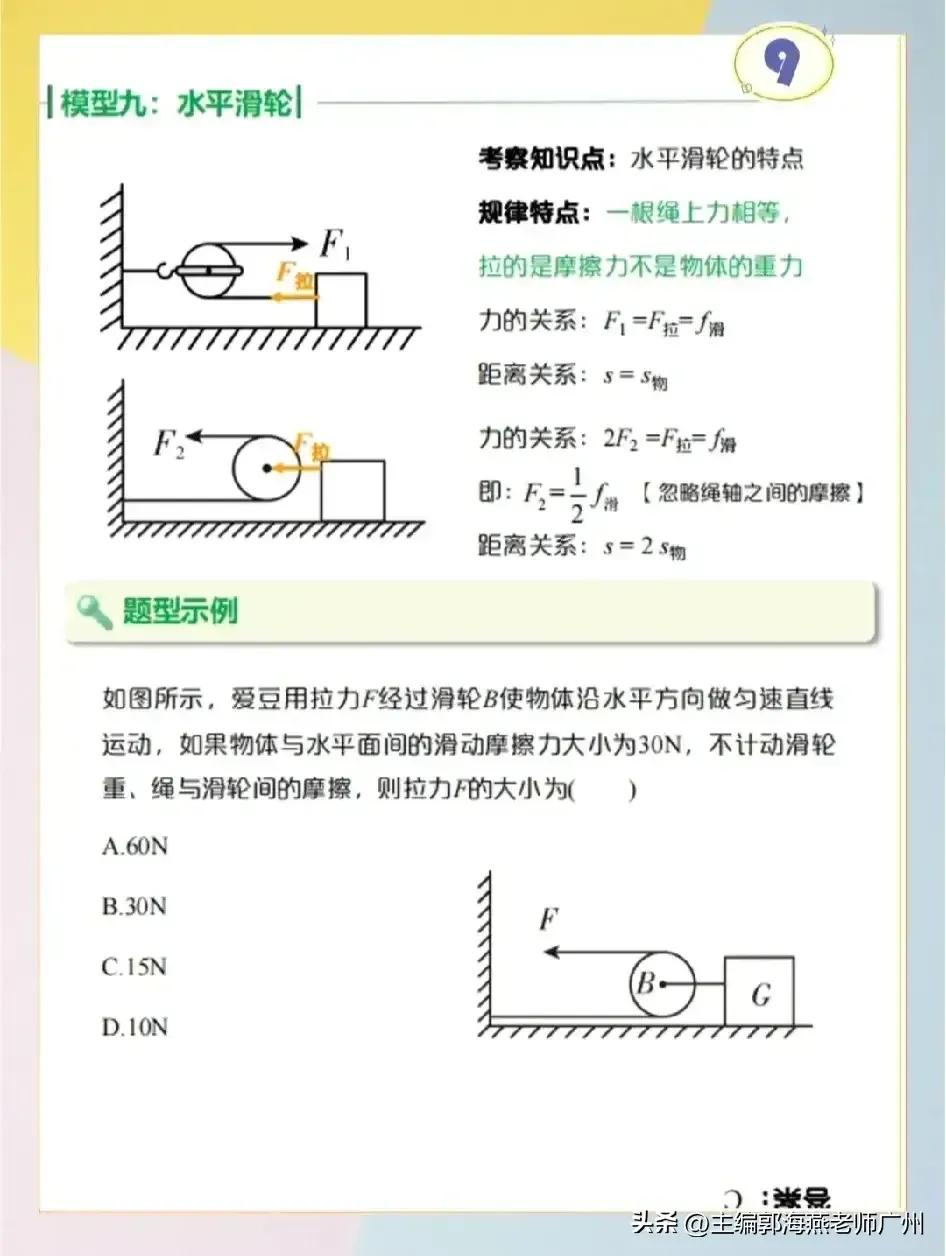
模型8:水平滑轮一
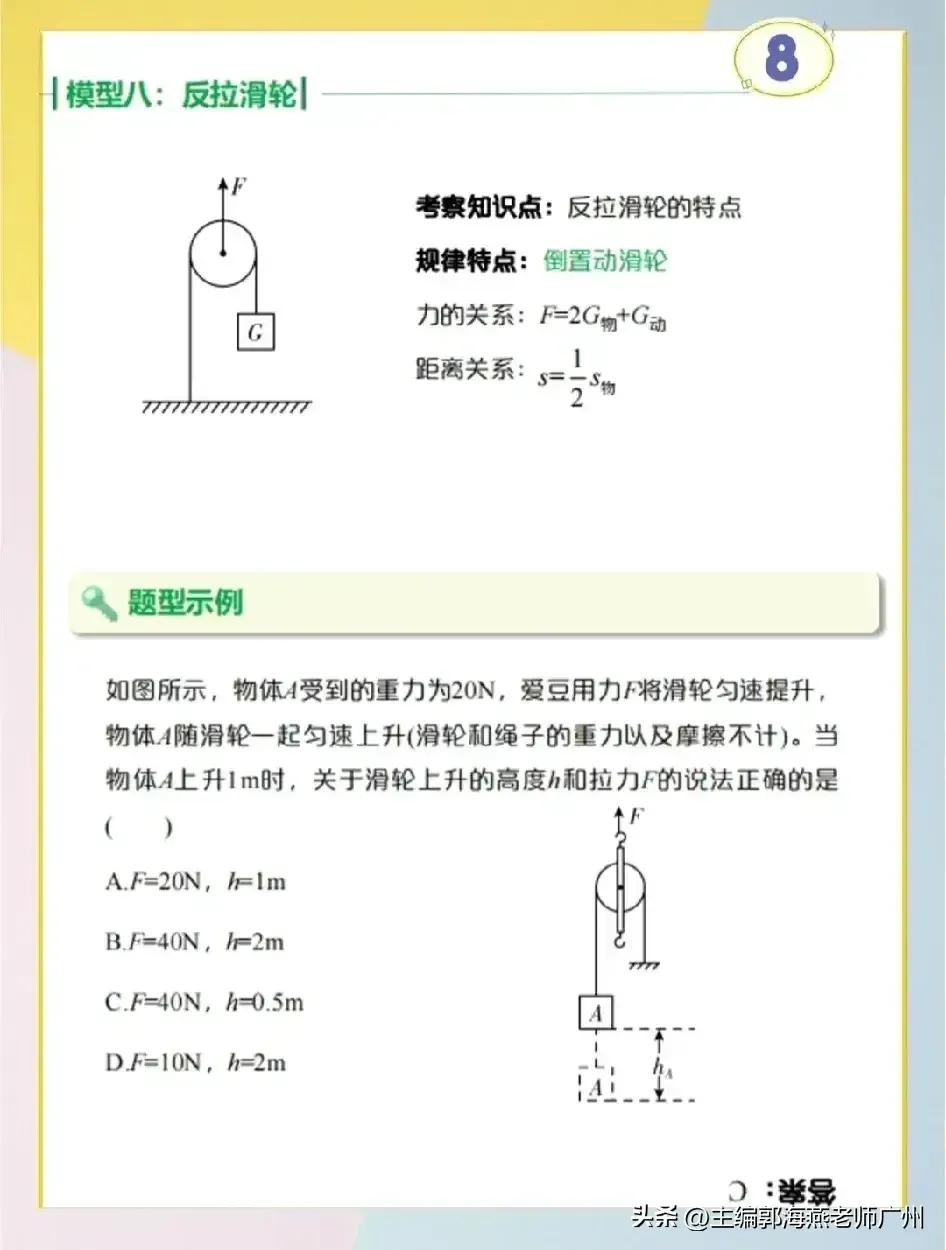
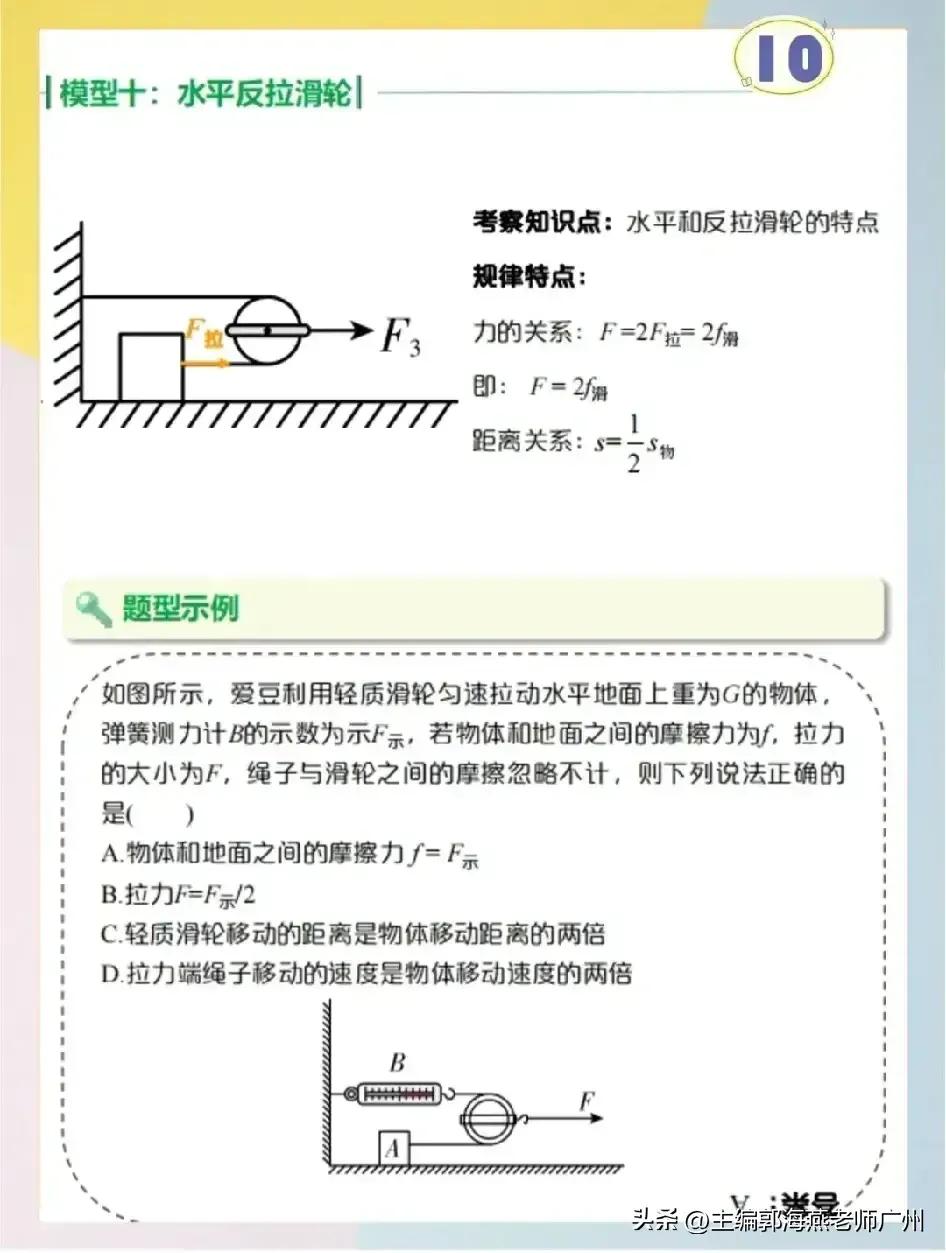
模型9:水平反拉滑轮
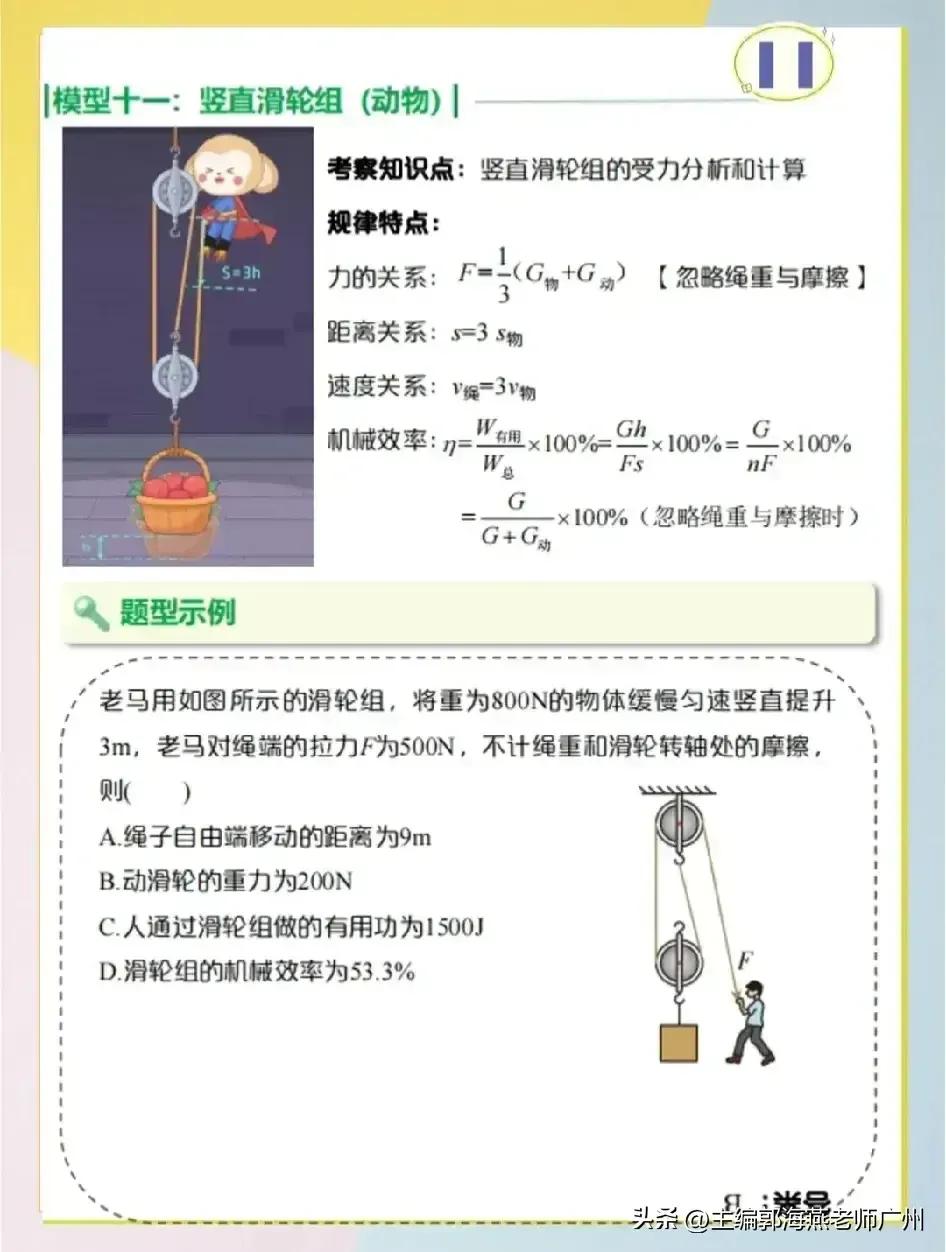
模型10:竖直滑轮组
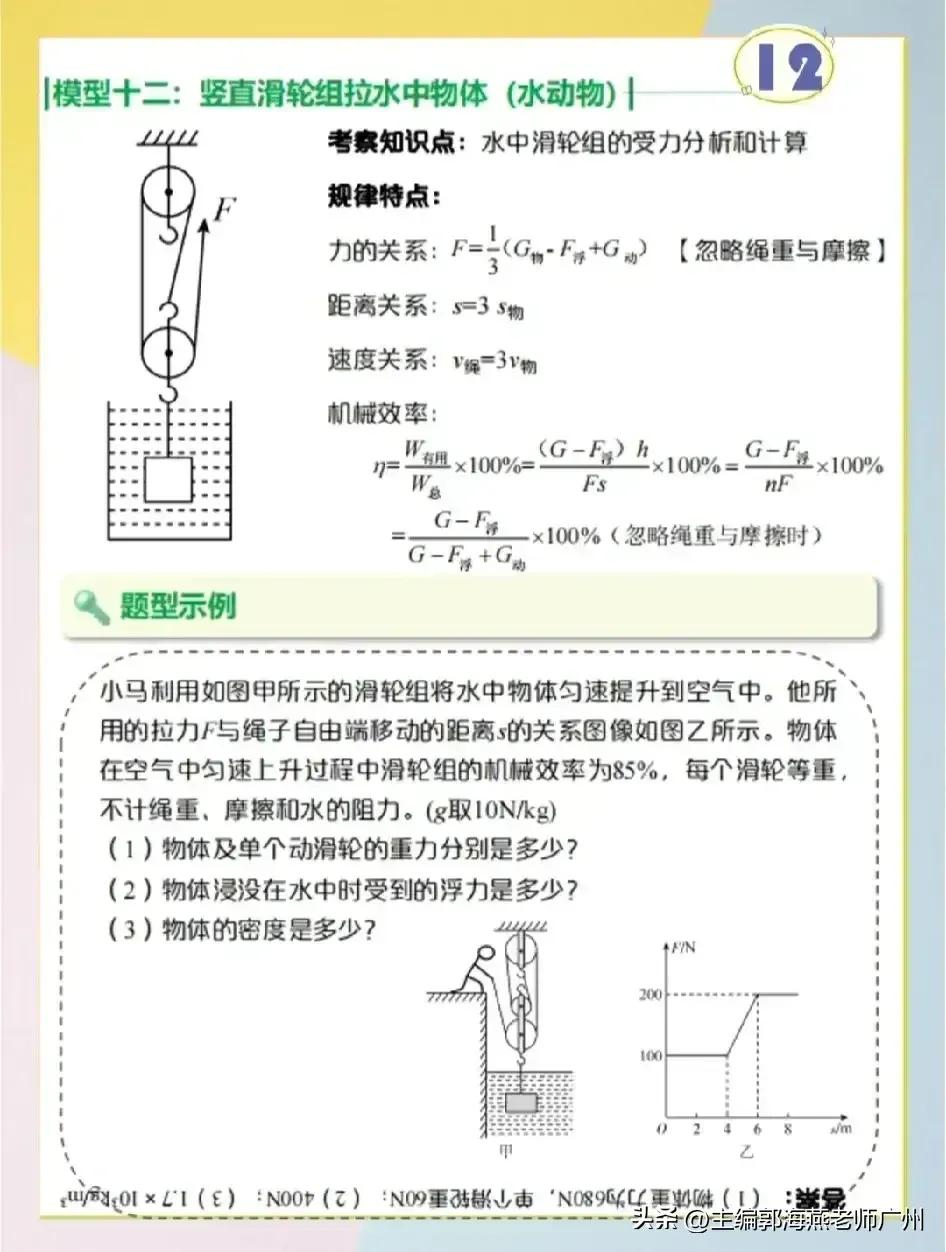
模型11:竖直滑轮组拉水中物体
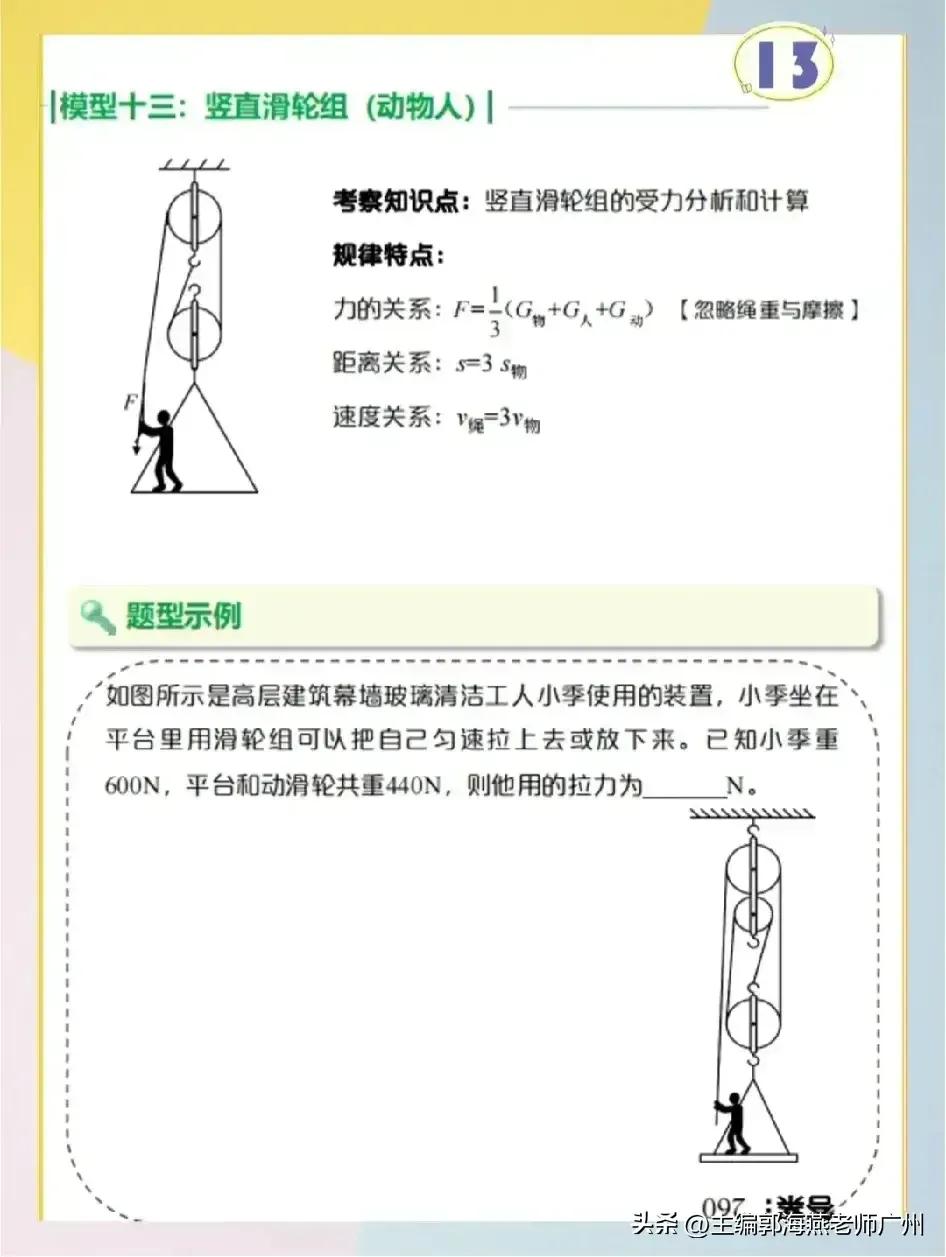
模型12:数字滑轮组动物人
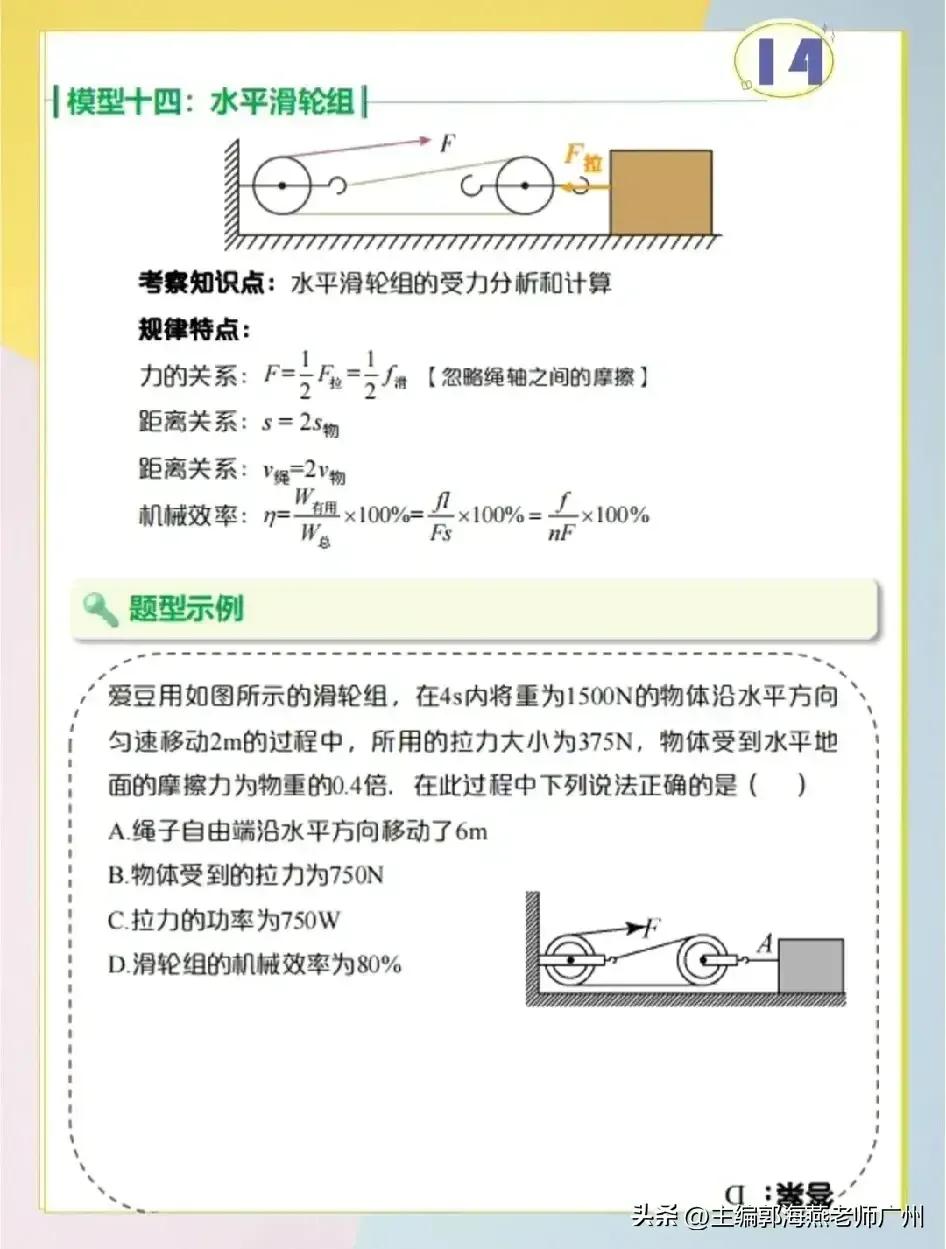
模型13:水平滑轮组,
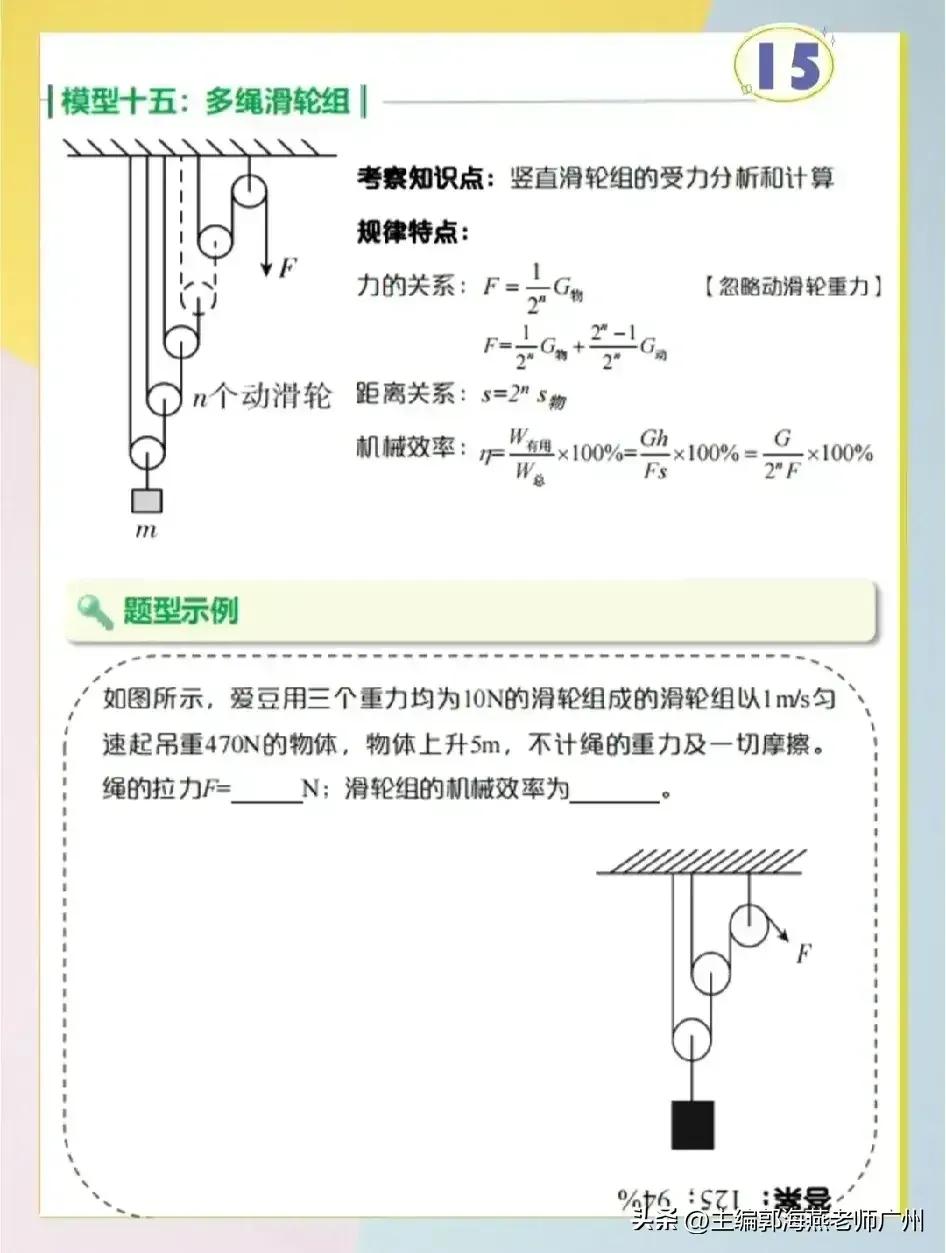
模型14:多绳滑轮组
模型15:斜面一
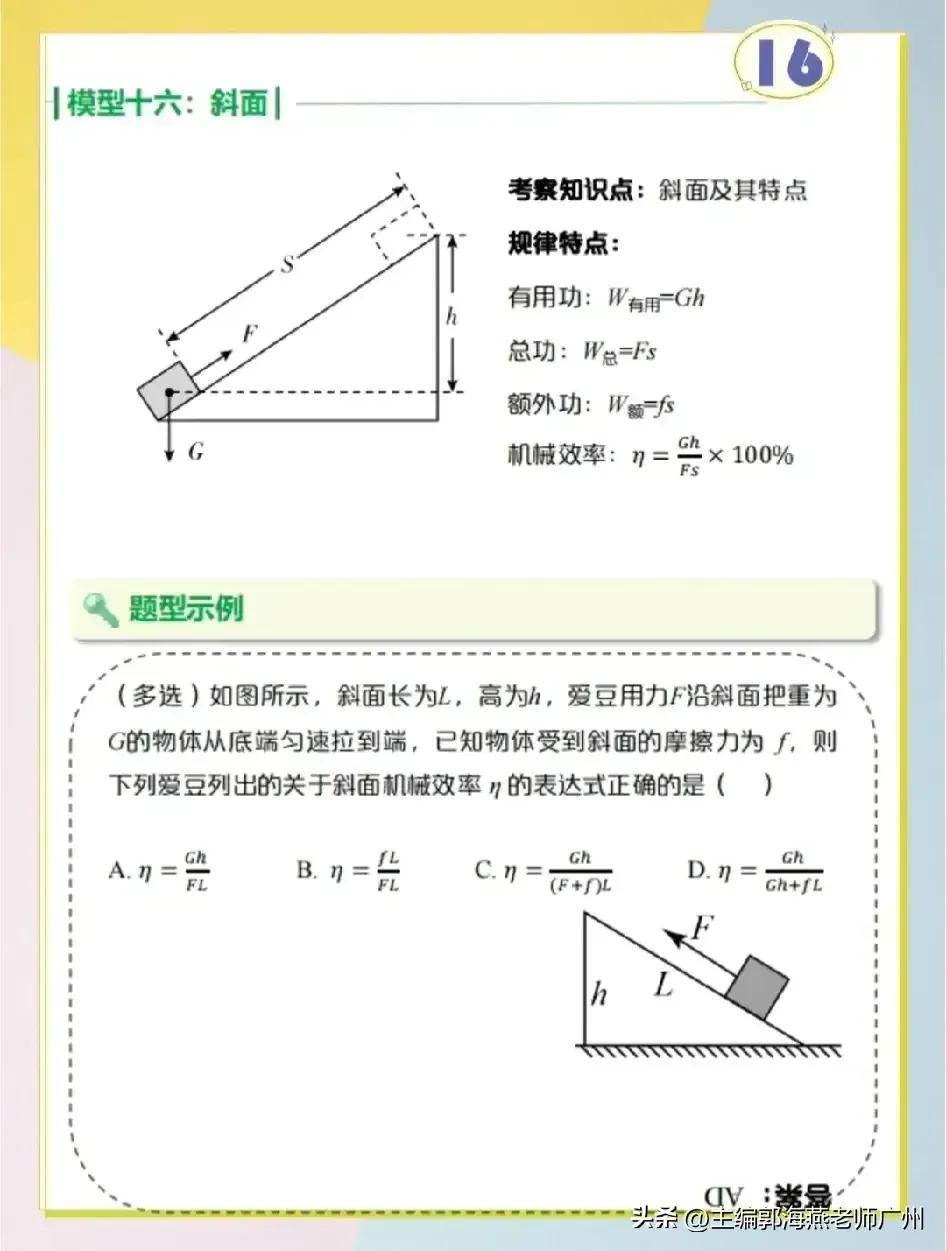
模型16:斜面二
简单机械16个经典模型
模型1:杆枰
模型2:杠杆最小力
模型3:杠杆动态平衡_力始终垂直
模型4:杠杆动态平衡
模型5:杠杆动态平衡
模型6:定滑轮一
模型7:定滑轮二
模型8:水平滑轮一
模型9:水平反拉滑轮
模型10:竖直滑轮组
模型11:竖直滑轮组拉水中物体
模型12:数字滑轮组动物人
模型13:水平滑轮组,
模型14:多绳滑轮组
模型15:斜面一
模型16:斜面二