文 |言上月
编辑 | 言上月

前言
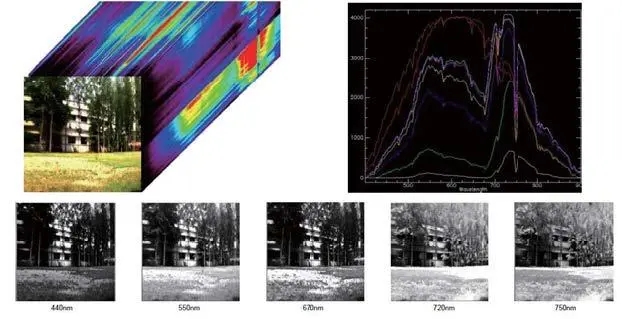
高光谱LiDAR(HSL)的概念出现于本世纪初,它将主动高光谱成像技术和LiDAR测距技术结合到一个具有精细光谱分辨率的单一仪器框架中。
这种集成还有效地解决了高光谱成像仪收集的高光谱图像与LiDAR系统收集的点云之间的配准问题。
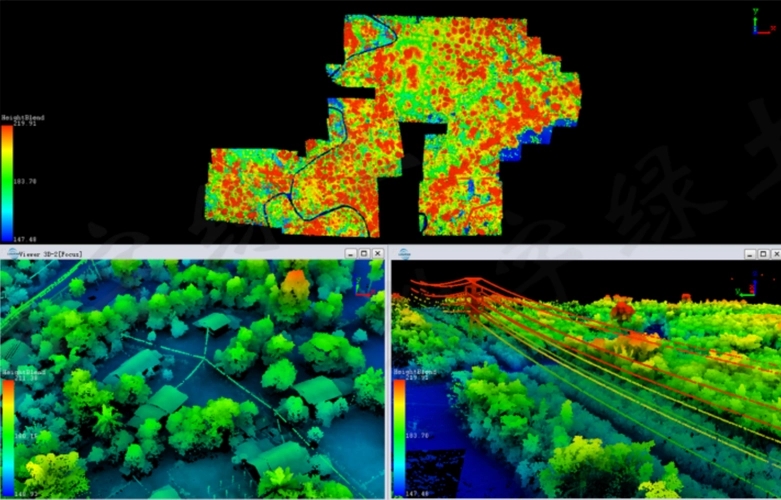
通过将几何信息与其光谱分辨波形的光谱信息相结合,无疑增强了HSL的定量和定性分析能力。这种具有额外多光谱信息的点云数据为自动点云处理、目标分类和环境理解创造了创新机会 。
几十年来,遥感界一直在研究将高光谱成像和LiDAR结合到一个框架中。
主动激光雷达收集的点云与被动成像光谱仪收集的光谱图像相融合,已被广泛研究用于各种研究目的,例如森林清查、土地分类和矿物鉴定。
例如,中国科学院光电研究院提出了基于单色激光源的推扫式激光雷达与光谱成像传感器共享光学系统,快速生成3D光谱的方案。
然而,由于注册问题,两个数据集的组合数据处理很复杂。
此外,该系统不能避免光照条件的变化,并且排除阴影区域的能力有限,因为光谱图像是以被动方式收集的,这可能会影响最终检测结果。
为了实现返回激光信号的高光谱记录,不同波长的多个激光器或超连续谱激光器(SCL)是当前的主要选择。
通过在不同波长上运行的多个激光器,可以轻松构建高光谱LiDAR,特别是用于农业和林业相关研究的双波长LiDAR系统。

此外,爱丁堡大学的研究团队提出了一种4波长多光谱冠层激光雷达,具有531nm、550nm、660nm和780nm的四个激光器,用于虚拟森林监测。
该系统在四个波长范围内运行,该系统对从随后合成为单光束的四个半导体激光二极管恢复植被特征最敏感。
通常,这种类型的HLS系统由多个在不同波长下运行并共享同一光学系统的独立LiDAR组合而成。

然而,基于多激光器的解决方案的缺点也很明显,光谱带被单色激光源的可用性重新划分,导致通用性有限,而且激光发射系统随着通道数量的增加而变得庞大,将多个激光源合成为单个光束需要在系统设计中付出相当大的努力,特别是如果预计会有额外的光谱带配置。
通常,商业SCL会连续覆盖可见光到短波红外(SWIR)光谱,这非常适合涉及连续光谱覆盖的应用。
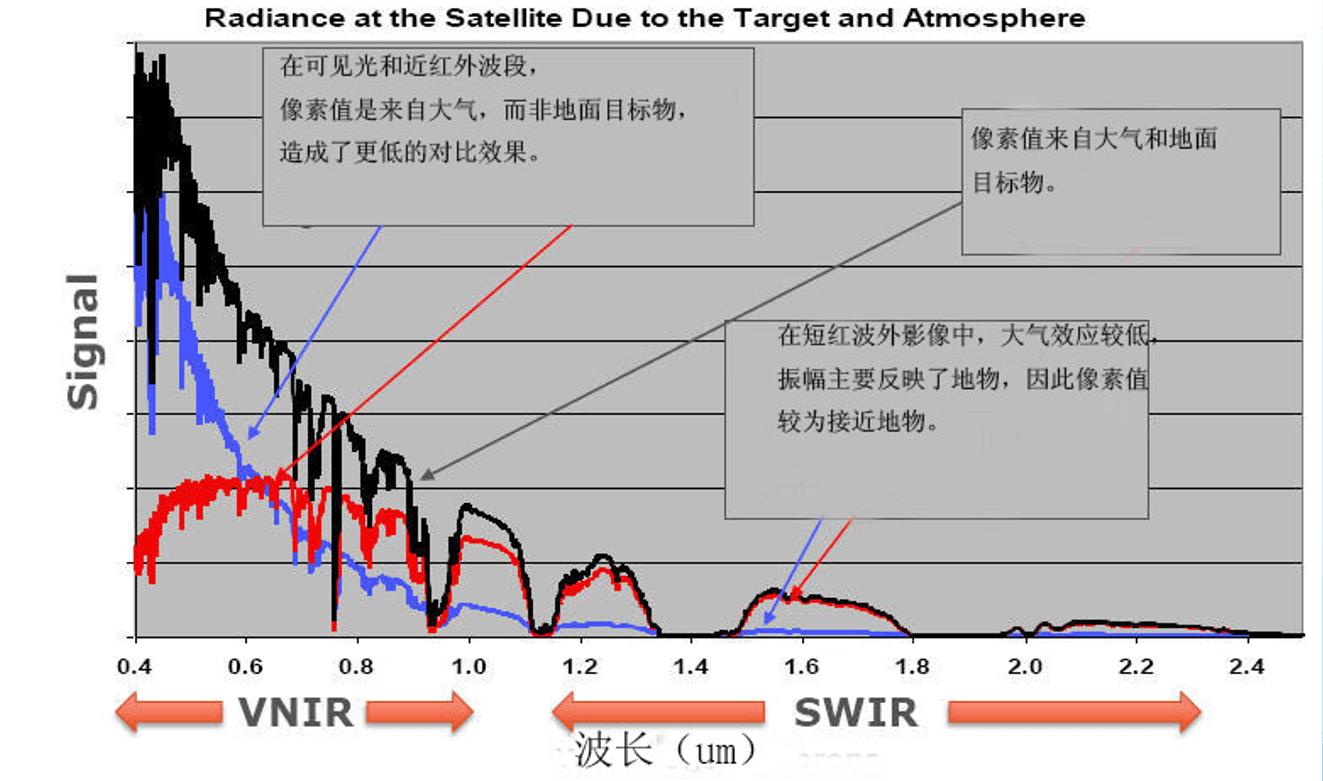
然而,对于SCL,需要分光设备来对宽带激光信号进行光谱分离。
这种装置可以由光学滤波器、光谱仪、液晶可调滤波器(LCTF)和声光可调滤波器(AOFT)组成。

方法
AOTF是一种可调带通窄带滤波器,带宽为几纳米到几十纳米,通常使用射频(RF)信号使用声光效应来衍射和移动光的频率。所选波长由公式(1)确定
(1)
其中所选波长( λ )是双折射引起的折射率差异的函数(Δn = ni-nd)、施加的RF信号的频率( f )、声波在晶体材料中的速度( V )和入射角(θi)源激光束和要在射频中调制的晶体材料之间。
在这项研究中,AOTF设备用于快速动态地从宽带白色激光源中选择特定波长。
随着AOTF器件上施加的RF频率的变化,滤波后的波长发生变化,从而在时间维度上产生连续的、高光谱分辨率的激光脉冲,波长的调谐通常需要几十微秒或更短的时间,非常适合地面波和移动HSL开发,以提高未来的运营效率。
不同频段的非同步测量似乎是基于AOTF的HSL解决方案的固有缺点。
然而,考虑到滤波器的高调谐速度,这不是问题,AOTF-HSL是根据中的示意图设计的图1。
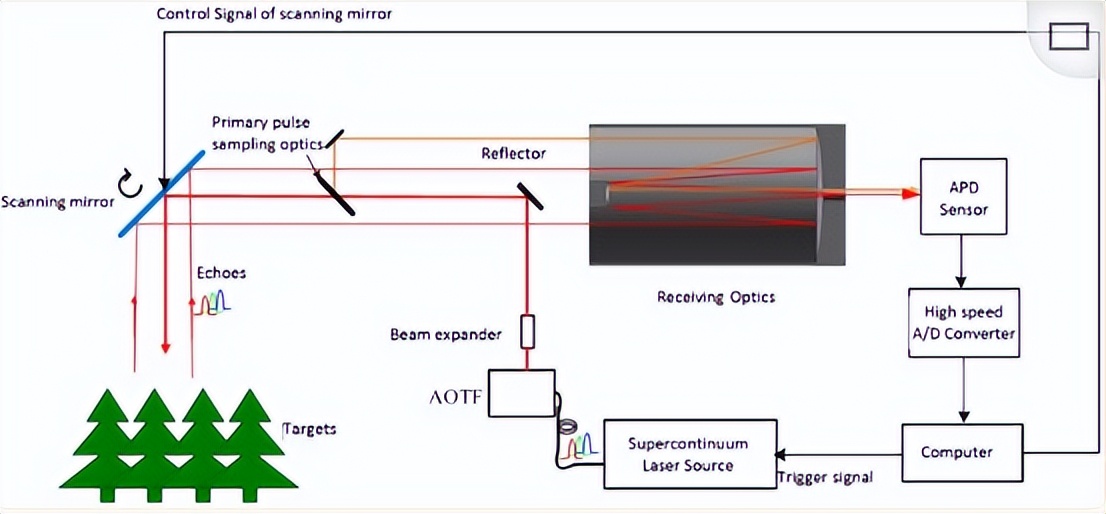
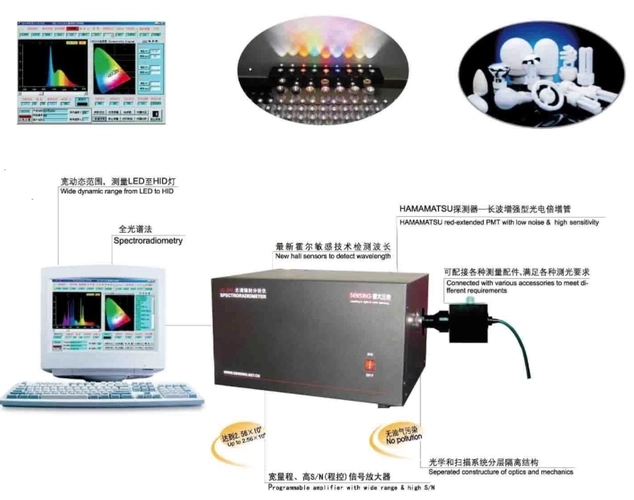
图1基于声光可调谐滤波器的高光谱激光雷达(AOTF-HSL)的示意图设置
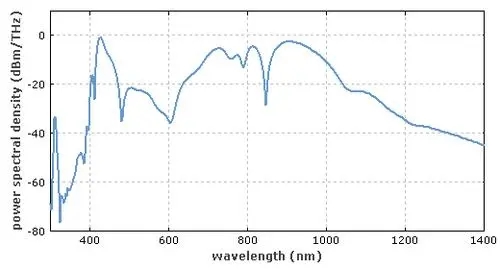
计算机触发激光源发射“白色”激光脉冲,激光源为SCL源(型号YSL ® SC-OEM,YLSphotonicsInc),波长范围为450至2,400nm,单脉冲最大功率超过1.9µJ。
“白色”激光脉冲从微结构光纤(MOF)发出,并由AOTF装置(型号YSL® AOTF-Pro,YLSphotonicsInc)过滤,这是一个基于波长选择模块声光晶体。
初级脉冲采样光学组件安装在传输光学路径中,以将传输脉冲的一小部分引导至接收光学器件。将采集到的信号触发高速A/D转换器,将所选光谱带上的发射脉冲和接收回波的波形进行存档,从而可以通过应用测量飞行时间和光谱强度对收集的波形进行后处理算法。
准直的窄带激光束通过放置在接收望远镜光轴上的反射器反射向目标。
使用具有10GHz采样率的高速示波器对APD模型的输出信号进行采样和记录。
AOTF-HSL与其他HSL之间的主要区别在于,当AOTF设备从SCL过滤特定波长时,使用单个像素APD而不是APD阵列来收集时间维度的返回。
AOTF-HSL以10nm光谱分辨率调整其输出,从而产生一组51个通道,其光谱分辨波形回波覆盖目标上采样点的500–1000nm。
当收集到当前采样点上的所有光谱分辨波形回波时,计算机将扫描镜转到下一个采样点并再次重复整个测量过程。

表1所设计的基于声光可调滤波器的高光谱激光雷达(AOTF-HSL)的规格

测试和校准
AOTF-HSL在实验室环境中进行了设计和测试,尽管APD模型没有完全被屏蔽覆盖,但由于示波器以AC耦合模式收集回波信号,因此不同环境照明条件的潜在影响仍然很小。
进行了两次测试以总体评估范围精度和光谱轮廓的精度,范围测试中使用的目标包括四个标准灰板,反射率分别为100%、70%、40%和20%。
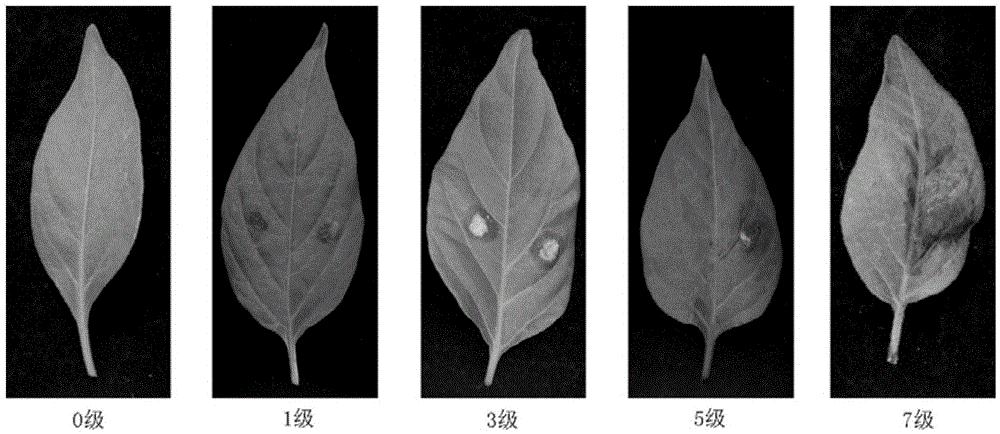
黄色和绿色的叶子来自四种植物,即芦荟(AloearborescensMill.)、龙血树(Dracaenaangustifolia)、橡胶树(榕树 前霍内姆。)和radermachera( RadermacherahainanensisMerr. ),通过比较SVC光谱仪的相应测量值,用于光谱测量评估。

由于AOTF-HSL光学设计的复杂性,使用当前设置无法轻松测量真实范围。
因此,通过使用垂直激光束测量四个标准灰板(20%、40%、70%和100%)的相同范围来评估范围精度或稳定性而不是范围精度。
距离为37.50m,由商用徕卡激光测距仪(LeicaD8)测量接收光学器件(卡塞格林望远镜)与目标之间的距离,然后将其用作参考距离而不是真实值来评估距离性能。
灰板放置在距离AOTF-HSL超过37.50m的位置,以测试光谱通道上距离测量的均匀性。

由于垂直激光束,对于每个灰板,选择灰板的中心点进行距离测量。距离精度是根据覆盖全光谱(51个光谱通道)的距离测量值进行评估的。
对于每个光谱通道,在相同条件下收集16个测量值(波形),每个光谱通道的距离结果是其16个测量结果的平均值。
不同光谱通道的飞行时间测量是根据使用简单的最大算法以每秒10G采样记录的收集波形计算的。
芦荟( AloearborescensMill. )、龙血树( Dracaenaangustifolia )、橡胶树( FicuselasticaRoxb.exHornem. )和Radermachera hainanensisMerr.)植物由于其叶子特性的多样性而被选择用于光谱剖面测试。
从500nm到1000nm范围内的四种植物的六种不同叶子(四种绿色样品和两种黄色样品)中收集了具有10nm分辨率的连续光谱分布,并辅以具有99%反射率的白色反射率标准。
将收集的光谱图与SVC光谱仪收集的参考数据进行比较。
植物和AOTF-HSL之间的距离约为6米,以收集更好的信噪比波形,尤其是在500–650nm范围内。
HSL系统强度校准的精度是许多定量应用的先决条件,最近成为一个重要的研究对象。
除了范围之外,AOTF-HSL还能够在一系列连续光谱通道中记录目标反射功率。
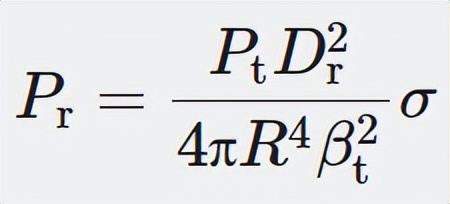
因此,必须进行校准才能准确揭示光谱观测背后的物理本质,LiDAR方程总结了描述LiDAR传感器接收信号过程的所有相关参数,可以写成:
(2)
其中Pr是进入接收器的功率,Pt是传输功率,Dr是接收光学器件的孔径,R是范围,βt是发射器波束宽度,并且σ是后向散射截面,可以表示为:

(3)
其中,σ是一个立体角的锥体,入射辐射均匀地散射到该锥体中,ρ是表面反射率,并且A小号是散射的接收区域。
LiDAR校准可以通过将传输信号的样本通过接收器并监测来自标准目标的信号来实现。
由于朗伯反射特性和已知的反射率值,类似的方法也可以用于具有便携式亮度目标的机载激光扫描系统。
AOTF-HSL的强度在实验室中以Spectralon ®(LabsphereInc.,NorthSutton,NH,USA)白色反射标准作为参考进行了校准。
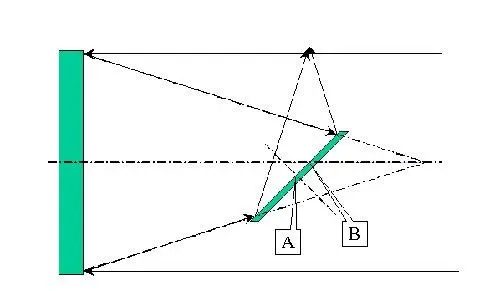
整个校准系统如图2所示。
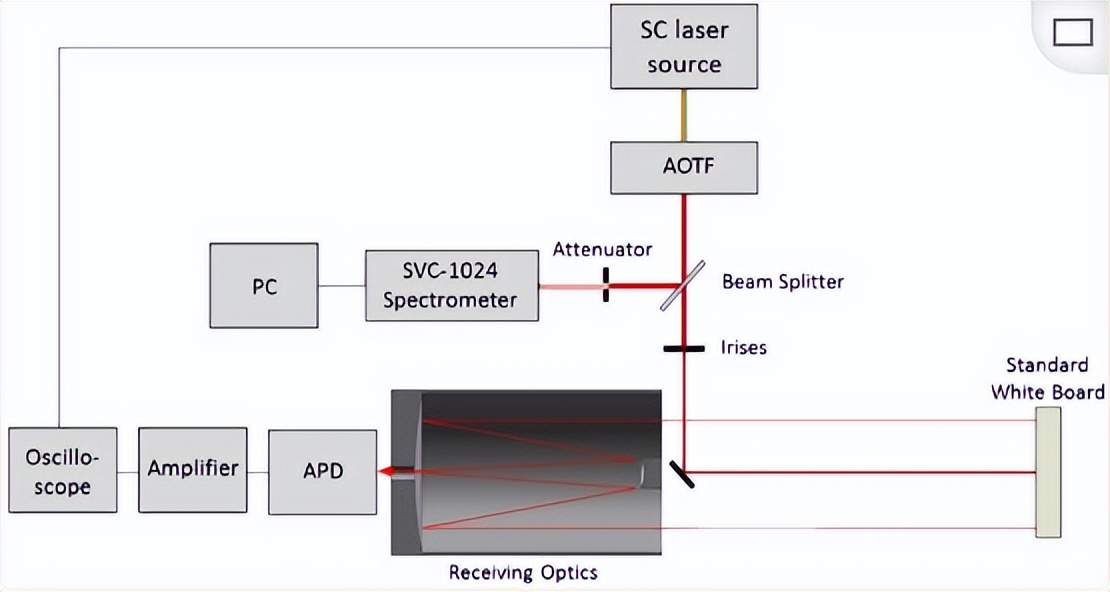
图2 AOTF-HSL的校准
在校准中,来自AOTF的选定光谱通道的激光束的输出能量由SVC光谱仪通过分束器(T:R=92:8)和衰减器(8%)进行监测。
光阑用于滤除高阶衍射激光束以获得更高的精度。具有99%反射率的白色反射率标准用作校准目标。
从LiDAR方程中,我们发现一旦建立了校准系统,白色反射标准的后向散射截面、接收光学器件的孔径、距离和发射器波束宽度都没有改变。
从SVC光谱仪测量,可以计算传输功率,假设APD的响应(F一个P丁( λ ))是一个线性模型,APD的响应曲线(V( λ ))在选定波长( λ )上可以通过以下等式(4)建模。

(4)
其中 线性模型 的系数和变量b表示模型的偏移量,通过修改SCL源的发射功率来改变发射功率,可以实现ADP和光谱仪的响应曲线。
因此,可以确定所有频谱通道的线性模型的系数和线性模型的偏移。

测距精度评估
通过从原始波形中减去回波脉冲的峰值位置以及主脉冲的相应峰值位置,可以根据简单的最大值算法计算范围。
从中可以看出图3标准灰板的距离测量值从37.53m到37.575m不等,36个通道的距离测量值的方差为2.5mm(20%)、7.2mm(40%)、7.5mm(70%),以及分别为7.1毫米(100%)。
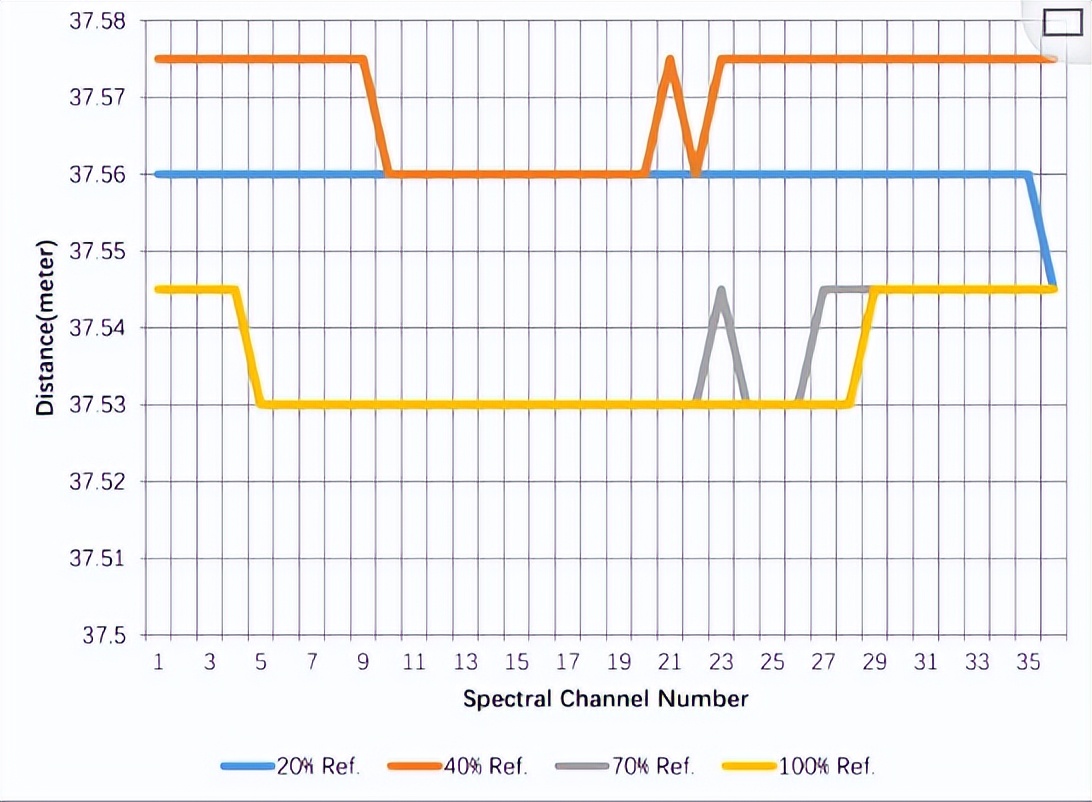
图3AOTF-HSL在4个具有不同反射率的标准目标上从650nm到1000nm的范围测量
对于选定的灰板,可以观察到光谱通道范围测量的有前途的均匀性。
必须解决的一个问题是,由于当前的AOTF-HSL系统配置,无法获得标准反射板范围的真实值。
从进行的距离评估可以得出结论,每秒10G采样时,不同波段的ToF测量得出的距离分辨率为1.5厘米,这对于某些应用来说可能是不够的,因此应该研究更先进的后处理算法以提高距离分辨率。
如果需要更好的距离精度,来自不同反射板的随机距离误差(最大45毫米)也应该通过更复杂的波形处理来减轻。

然而,观察到的趋势是距离测量随着目标反射的减少而增加。
在图3,由于APD传感器的低灵敏度和低于650nm的SCL的低传输功率强度,缺少500–650nm光谱通道的测量。

结语
基于AOTF的具有10nm光谱分辨率的51通道HSL在范围和连续光谱轮廓收集方面的一般能力。
距离精度可以达到几十毫米,原型HSL的有效范围可以达到几十米,至少对于高于650nm的光谱通道,当前的系统配置,这对于地面和移动应用来说非常有前途。
使用通过接收光学器件传递传输信号样本并监测来自标准目标的光谱仪信号的校准方法,我们可以更准确地校准AOTF-HSL收集的光谱轮廓。
通过植被实验验证了AOTF-HSL在农业中的应用。分析了四个物种的绿色和黄色叶子的光谱图。
将校准后的AOTF-HSL实验结果与标准光谱仪的相应测量结果进行了比较。
叶片样品的平均光谱差异(绝对值)很小,将HSL和光谱仪收集的光谱剖面进行比较,显示出可靠的拟合度,证明HSL系统的反射率结果是可信的。
通过评估整个频谱的适当精度范围和设计地面或移动版本AOTF-HSL来提高系统的适用性,以进行额外的现场测试,而不是在受控实验室环境中进行测试。
此外,其他类型的应用,例如基于机器人几何特征和光谱特征的环境理解,也将使用当前配置进行研究,以验证其普遍适用性。