
在阅读此文前,麻烦您点击一下“关注”,方便您进行讨论和分享,给您带来不一样的参与感,感谢您的支持
文 | 笑史云烟
编辑 | 笑史云烟
«——【·前言·】——»
温室通风一直是农业工人关注的一个重要问题。本文介绍了一种基于SURF(加速鲁棒特征)特征匹配和纹影技术的低成本风速估计方法,用于温室通风口条件等温差和密度差较大的气流混合。通过流体运动学分析,通过像素位移直接描述流体运动。
将该算法与相应的图像形态分析和冲浪特征匹配算法相结合,利用特征点纹影图像对相邻帧中气流图像的变化进行匹配,从像素变化中估计速度。通过实验结果,该方法适用于湍流或扰动流体图像的速度估计。
当供风速度保持不变时,本方法从150帧视频中得到760组有效特征匹配点组,约500组有效特征匹配点组与理论无量纲速度相差0.1范围内。在高频风速变化的供给条件下,与风机转速数字信号和风速传感器数据比较,风速变化趋势与实际变化基本一致。
«——【·对温室气候的相关简介·】——»
风速的估计误差基本在10%以内,除非风速供给突然停止或风速为0m/s。该方法具有估算不同密度空气混合风速的能力,但在统计方法和实验设备方面仍需进一步研究。
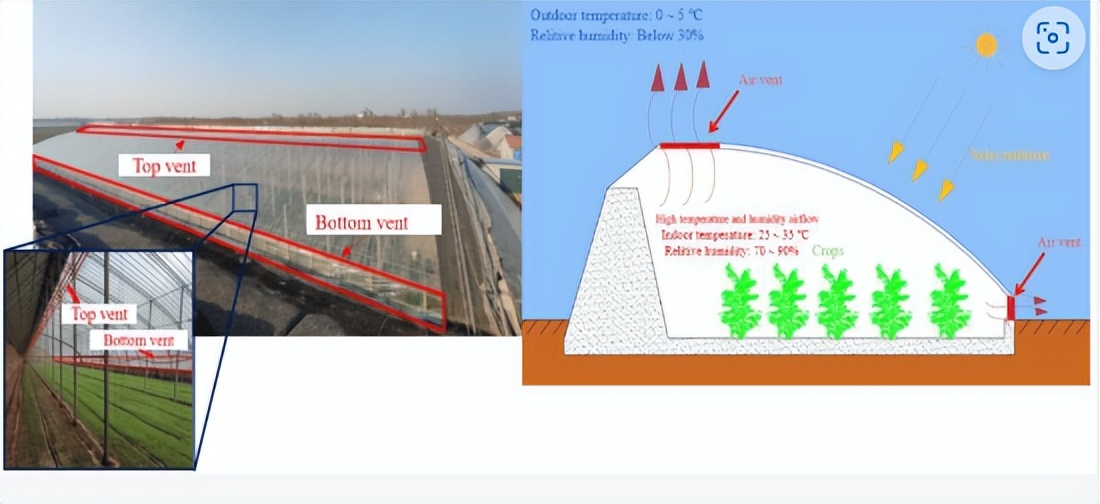
对温室内气候试验设施和方法的研究对农业活动具有重要意义。由于温室湿度高,导致植物病害,工作人员将打开温室的通风开口进行通风除湿。在一个单坡温室中,室内温度保持在30摄氏度左右,尽管白天的外部温度在5摄氏度以下。
然而,如果不打开通风口,其内部的相对湿度几乎达到100%,这对作物的健康和生长构成了严重威胁。温室内的工作人员需要测量通风口的风速,以确定通风量。适当的通风量可以确保温室内的温度缓慢下降,而不会导致植物死亡,即使通风口有一定的除湿能力。

通风管
在实际调查中,为了防止温室内温度迅速下降,工作人员只是打开顶部通风口进行自然通风。通风部分根据外部风速和风向的不同而产生不同的自然通风效果。通过通风口的气流在温室内外提供传热和气体交换。
因此,一种估算高温湿度空气流入低温湿度环境的气流速度的方法,有助于工人及时调整温室通风策略。许多学者基于多传感器对农业温室内的微环境进行了测试和研究。然而,对水平方向单侧通气形式的研究较少。
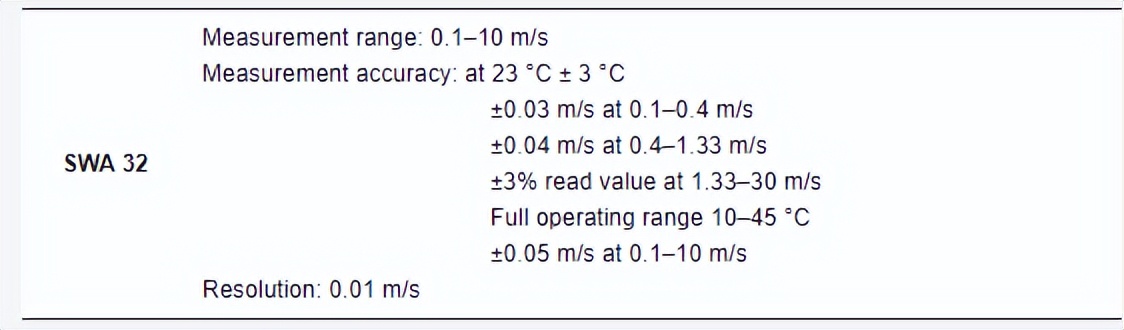
传统的农业风速测量设施主要包括热线风速计、杯形风速计、超声波风速计。热线风速表具有较小的热惯性,响应较快。然而,热线型线无法记录气流模式,并缺乏抵抗温度变化的能力。杯式风速计是一种标准设备,广泛用于大多数温室风速测试。

摄像机
杯式风速表的结构包括四到两个风杯。每个杯子安装在一个水平臂上,水平臂在等角的垂直轴上。因此,风杯式风速表具有复杂的旋转结构。例如,DEM6三杯式风速表有21个组件。
此外,杯式风速计的功能仅用于测量水平方向上的二维风速。它从传感器中收集数据,传感器得到四个半球形杯的旋转速率,并计算风速。在本文所讨论的应用环境中,有必要监测水平开口通风口的风粒位移。
«——【·材料和方法·】——»
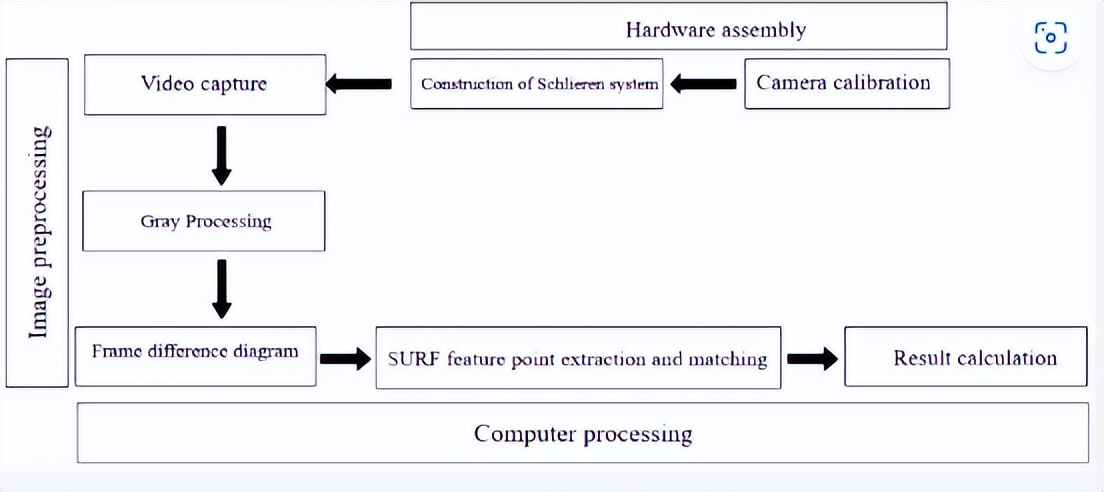
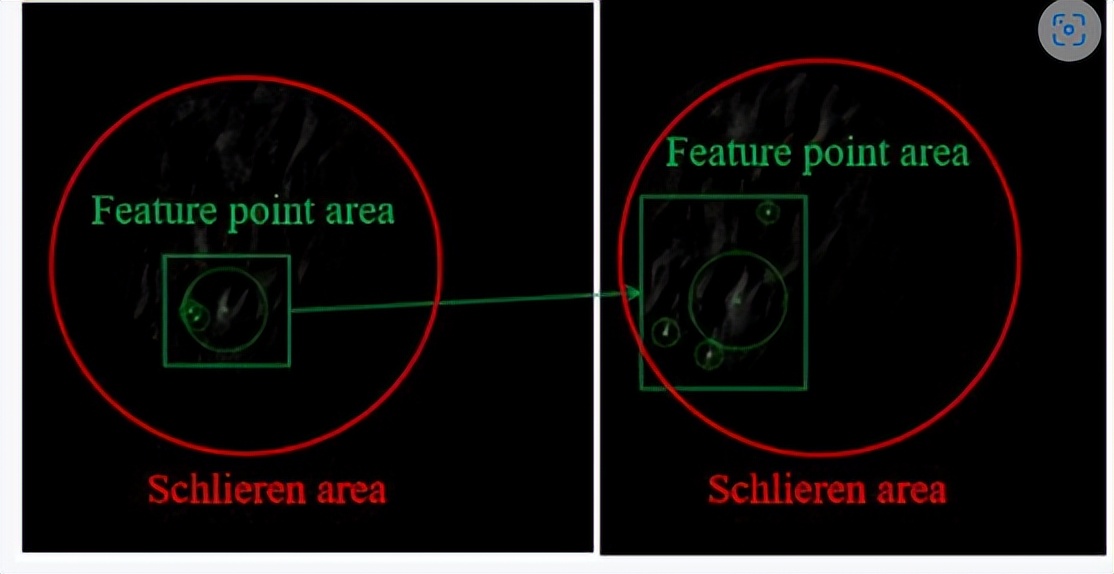
本文利用纹影系统中相邻两个帧的多个运动图像。SURF特征提取算法在图像形态学分析后提取特征点。该特征点是一个具有图像卷积核特征的流体微簇。对图像进行匹配,得到流体微团簇的位移矢量。通过统计计算特征点位移的值,估算气流速度和方向。
实验示意图
在相邻框架之间的很短的时间内,流体密度梯度边界的形态略有变化。SURF方法将能够从运动帧差异图像中匹配具有相同边界形态特征的流体图像微簇。SURF特征检测算法由Bay等人提出。在2006年和2007年。
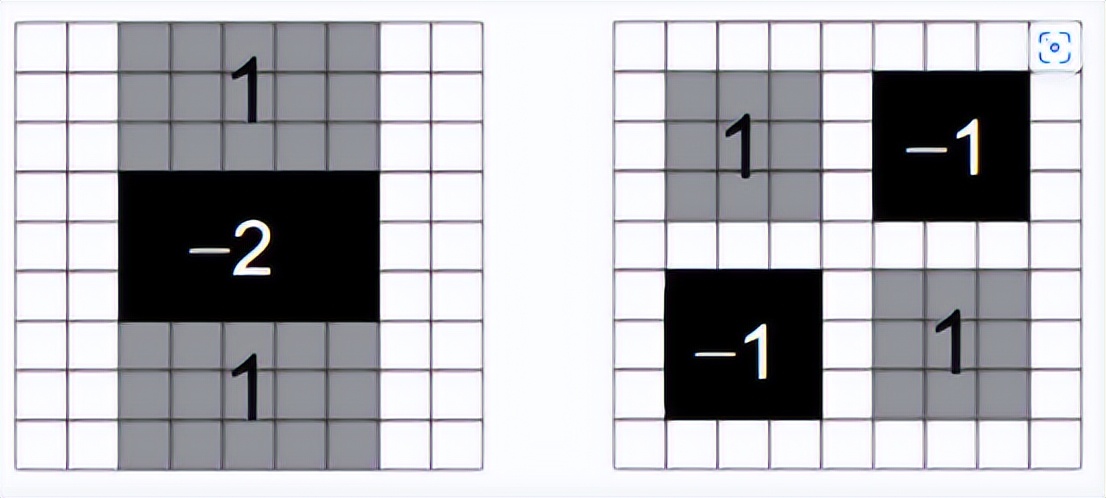
SURF特征匹配方法在特征点提取和图像校准[24,25]方面具有可靠的性能。该方法通过Hessian矩阵(式(1))选择POI(感兴趣点)点。通过计算每个像素的黑森矩阵来检测特征。该矩阵测量一个函数的局部曲率。
根据黑森矩阵的值,可以得到曲率的强度。这些角被定义为具有局部高曲率的像素。冲浪特征检测算法利用积分图像的特征,使计算量与图像大小无关。SURF特征匹配方法已广泛应用于车速测量等领域。并采用冲浪特征匹配方法,结合卡尔曼滤波测量棉花流动速度。
实验体对比
许多研究表明,SURF方法在特征点提取方面具有良好的性能。特征描述符可以捕获具有相同形状的多个位置或区域组。这些位置点或区域的速度向量是通过将它们的位置信息代入流体图像的相应关系来计算出来的。
与车辆运动检测不同的是,具有密度差异的两种气体的相对流动并不清楚,特别是在纹影图像的层流状态下。运动帧差图像除了去除噪声和突出流体流动路径外,不仅保留了流体密度梯度的边界形状,而且强调了流体的运动轨迹。
在本文的预处理图像中,相邻帧图像(约1/30s),流体密度梯度边界的边界形态略有变化。SURF方法将能够从运动帧差异图像中匹配具有相同边界形态特征的流体图像微簇。
实验数据图
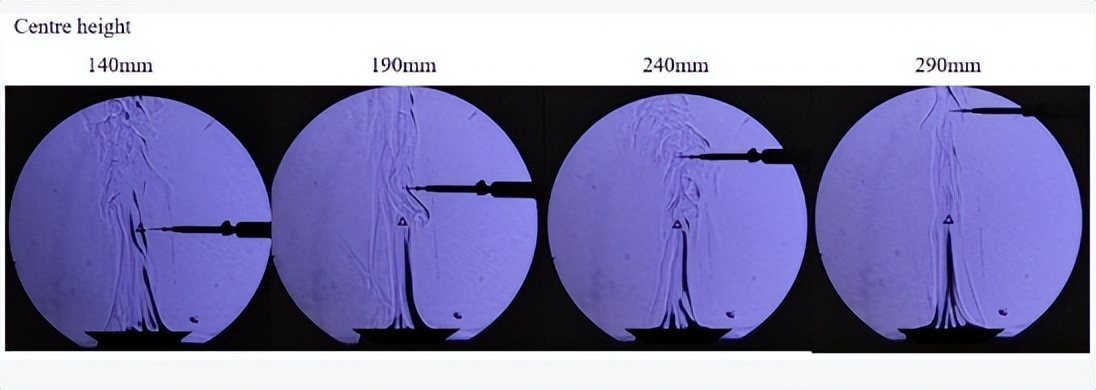
通过实验验证了该方法测量热湍流速度分布和平均速度的准确性。这些实验由两部分组成。第一部分是通过本文提出的方法来确定捕获点的无量纲速度是否符合热湍流射流的理论规律和实际测量点的测量值。通过调节风扇的PWM信号,使出风口风速保持在1m/s。
为了排除射流的初始段影响以及高温湿度对传感器的影响,在距出风口中心140mm、190mm、240mm、290mm高度测量风速值,计算其与中心轴无量纲速度之差。第二部分是验证用该方法计算出的区域内的平均风速与传感器的测量值之间是否存在差异。
同时,实验数据比较了本文提出的方法捕获风速高频变化的情况。在实验过程中,使用来自传感器的平均风速数据作为风速值。风扇控制的PWM信号值在0-255秒内每300毫秒随机变化一次。
实验示意图
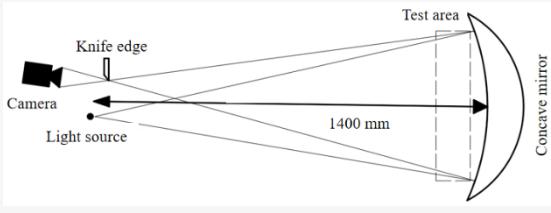
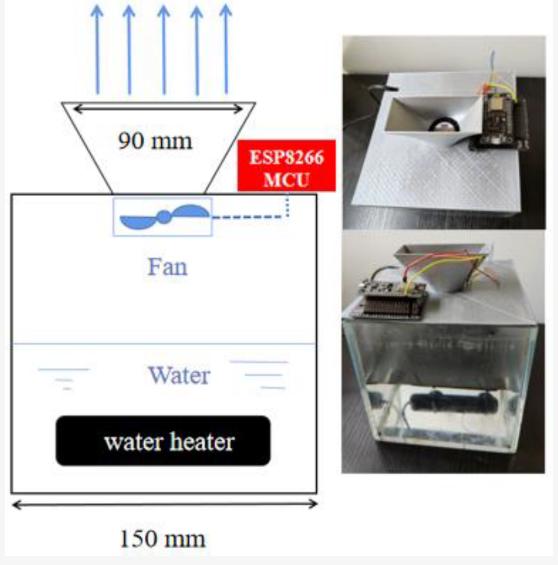
风速传感器每秒记录一次读数。PWM值间接地代表了传统传感器无法识别的风速的高频变化为了减少来自外部环境的干扰,实验是在室内进行。室内温度为5℃,风速为0~0.1m/s。实验设备包括一个校准的相机部分,一个纹影部分,和一个热湍流喷射发生器。
工业摄像机需要在校准后测量像素。采用张的校准方法对相机进行校准。所使用的软件为MATLABr2021a。采用结构已知、精度较高的校准对象作为空间参考。通过建立空间点与隐藏图像点之间的对应关系,建立了相机成型参数之间的约束条件,并根据优化算法进行求解。
«——【·结果与讨论·】——»
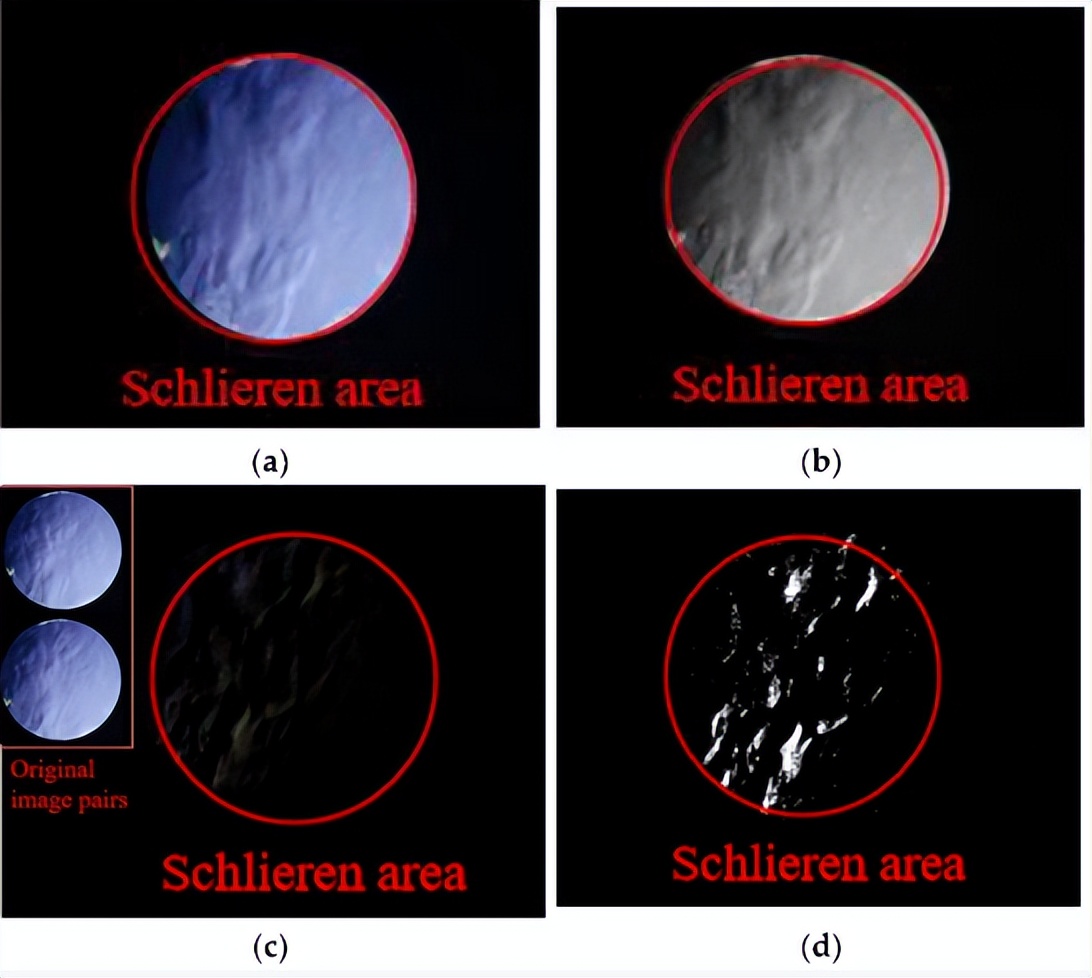
利用软件对得到的图像进行处理,并通过帧差计算提取的三帧。虽然帧差图像可以去除图像中的非关键信息,但也可以去除部分流体流动的图像信息。红色框标记的区域是图像灰度值最高的区域。它的灰色值在220到240之间。
灰度
基于对运动差分图像的形态学分析,二值化方法有效地提高了图像的对比度。但是,如果使用侵蚀或开放操作对图像进行去噪,突出显示的集群的边界将发生显著变化。
因此,通过控制图像二值化的阈值来降低图像噪声是一种相对可靠的方法。与图像腐蚀和开放操作相比,为二值图像选择一个合适的阈值,不仅有效地降低了图像中的噪声,而且还降低了计算机的操作成本。
计算机通过比较选择合适的图像处理方法(包括运动差分图像、二值化和SURF特征点提取)后,对相邻的三帧图像进行特征点匹配处理。如果流体流动图像处于湍流状态,则气流的纹影图像包含大量的纹理。对于大多数图像,每个图像组获得超过10组特征匹配点组。此外,该视频的图像采样率为30fps,两帧之间的时差为0.033s。
实验平面图
计算机通过比较选择合适的图像处理方法(包括运动差分图像、二值化和SURF特征点提取)后,对相邻的三帧图像进行特征点匹配处理。如果流体流动图像处于湍流状态,则气流的纹影图像包含大量的纹理。
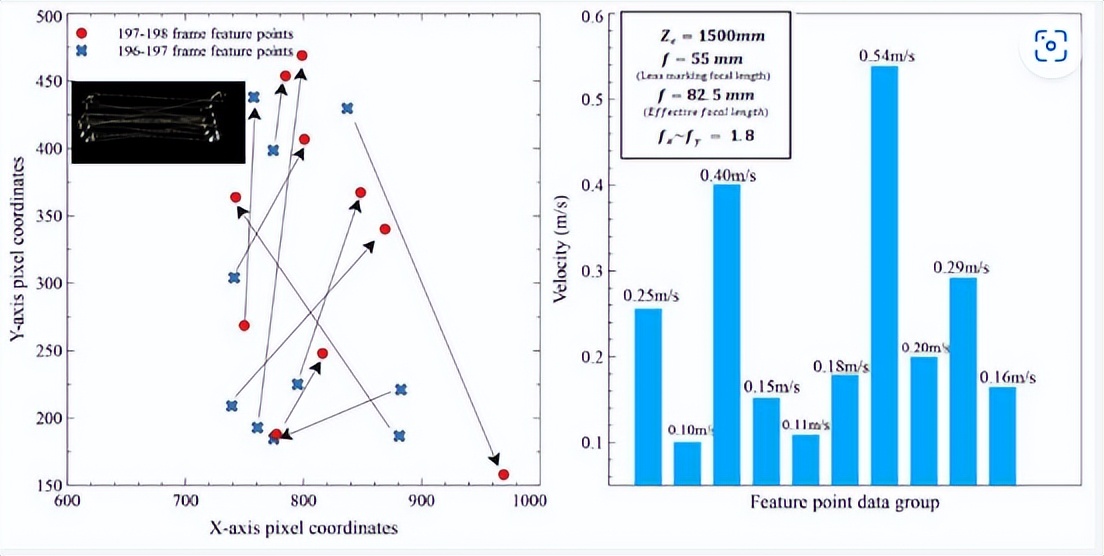
对于大多数图像,每个图像组获得超过10组特征匹配点组。此外,该视频的图像采样率为30fps,两帧之间的时差为0.033s。通过每秒输出风速值计算,将在1秒内掌握300组特征匹配点。在计算出这些点群的位移后,其平均值是图像中流体运动的位移。
以196-198帧的图像为例,选取10组特征匹配点,并进行位移计算。其余的图像也按照这个过程进行计算。结果如图14所示。最高速度为0.54m/s,最低速度为0.1m/s,平均速度为0.24m/s。
实验数据
由于图像采样率为每秒30帧,消除低匹配组的单个图像可以完全满足计算要求。说明了一个不充分匹配和一个冗余匹配的两个例子。将本文的计算方法应用于采集的视频的No.221到No.223帧,可以得到一组特征匹配点。显然,应该排除这组数据,因为特征匹配点组的数量不符合计算要求。
同时,不符合性与匹配结果的误差较大有关。因此,剔除匹配点组低于三组的数据不仅对最终结果的影响很小,而且减少了错误匹配点组对结果的误差和不利影响。
其次,具有超过10个匹配点组的图像数据被认为是数据冗余性,如帧No.284到No.286。这种情况应该得到优化。为了保证计算结果的准确性,需要一个高帧率的视频,以确保两个相邻的帧图像的转换在一个合理的范围内。
实验数据
然而,视频中图像捕获的帧越多,具有特征匹配点组叠加的计算机上的操作压力就越多。虽然10组数据对于单个步骤是一个很小的量,但由于每一帧数据的积累和叠加,这个量将是足够的。因此,本文所讨论的方法采用了两步法来选择数据。第一步是从多个点对应于同一个点的匹配点中删除数据。
第二步是随机选择10组数据作为计算所需的特征匹配点集。这两个简单的步骤不仅删除了冗余的数据,而且大大提高了操作自动化的效率。综上所述,对于匹配不足和冗余匹配,相应的处理基本可以满足计算要求。
«——【·笔者观点·】——»
本文研究了如何在机器视觉中利用太阳特征匹配技术对纹影图像中不同密度的湍流气体进行速度分析。该方法有助于农业温室冬季通风速度的测定。这不仅可以定量分析阴影图像的速度,而且还降低了实际应用的设备成本。为了总结这一呼吁,本文总结了以下几点:
实验数据
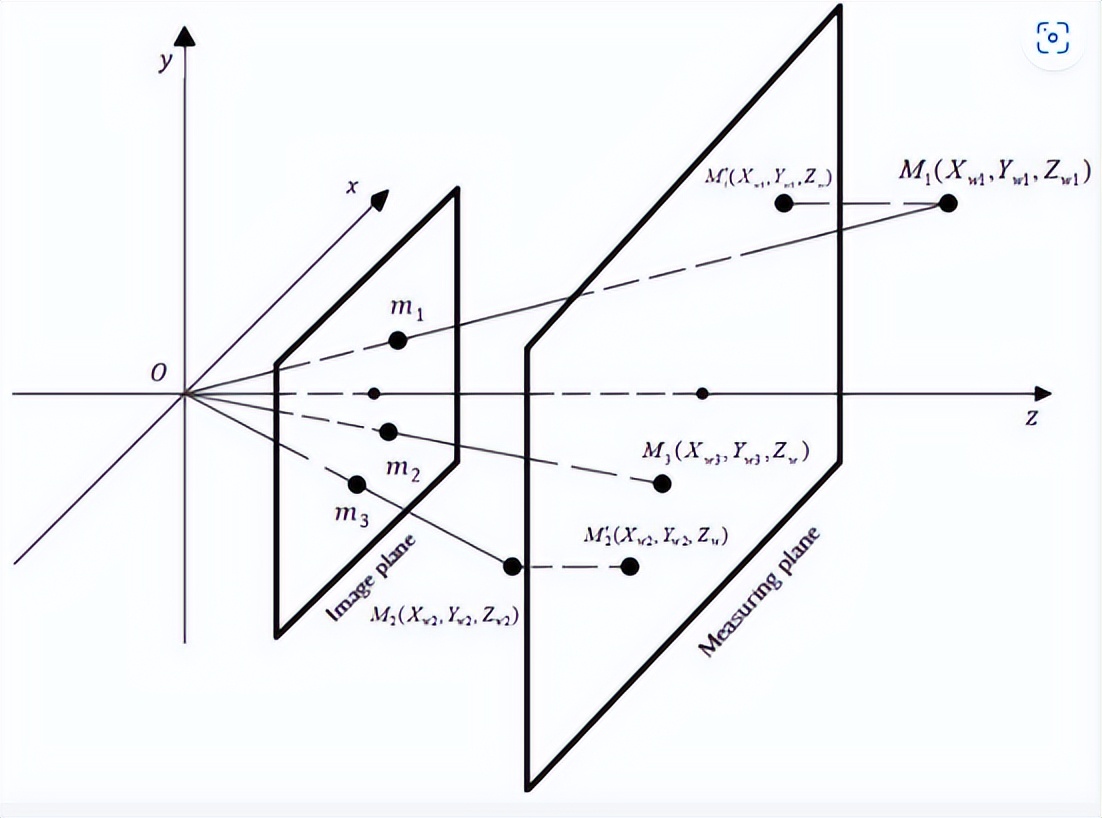
利用阴影装置和机器视觉计算方法,可以将具有密度差的两种气体的三维流动投影到假设的测量平面上,近似为二维流动图像;将像素变换与流体运动学相结合,从理论上得到了二维阴影图像的流体运动与图像像素的变化之间的关系;
利用运动差分图像去除重复图像信息并设置合理的二值化阈值进行快速降噪的方法,以获得更合理的图像特征点提取结果,提高计算机操作速度。讨论了两幅相邻图像经过处理后的SURF特征匹配结果和计算得到的风速。结果表明,实验值与实测值之间的相对误差可以控制在15%以内。
当短时间内风速为0m/s时,会严重影响该方法的计算结果。虽然在对两个相邻图像的分析中可以计算出0m/s的风速,但它并没有反映在最终的输出中。在未来的研究中,需要找到和改进解决方案;
实验数据
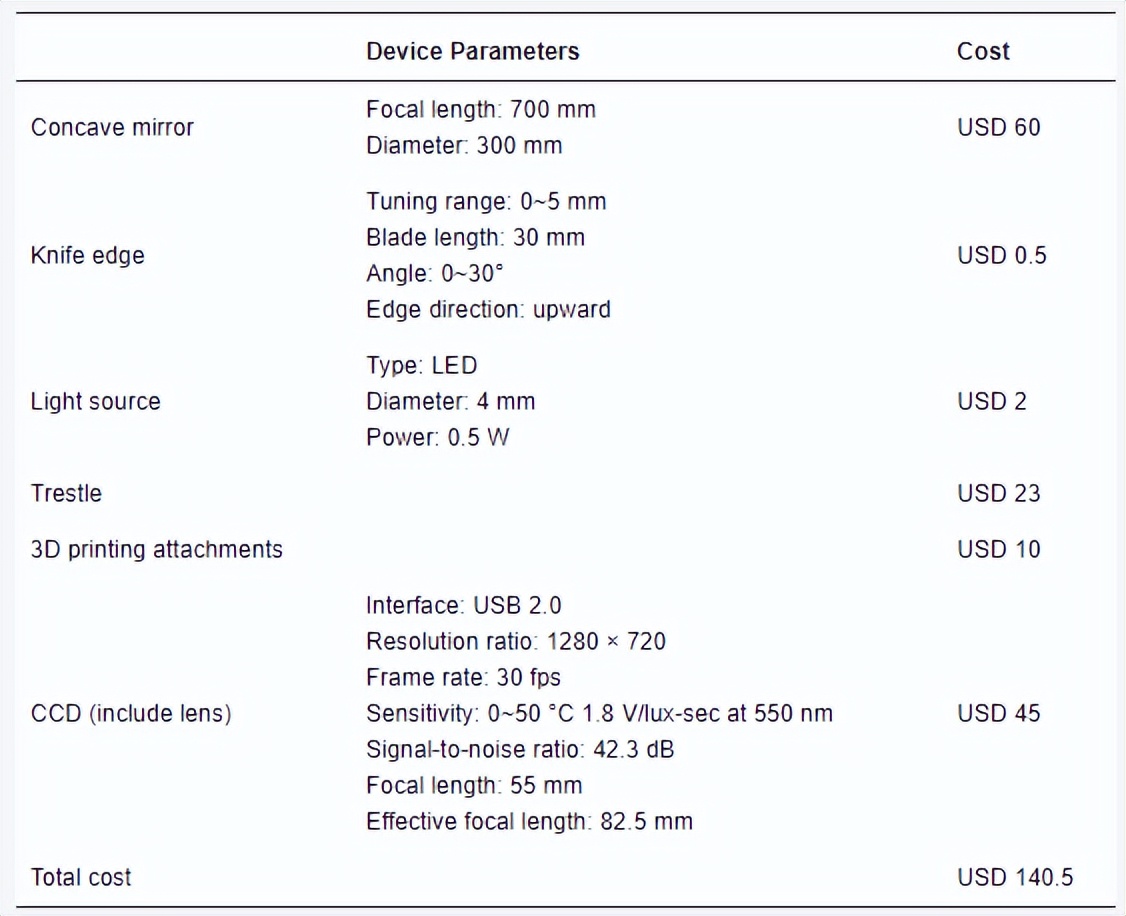
除了工业摄像机和机器视觉软件平台外,其他部分也使用开源硬件和3D打印来完成。遮阳系统的设备支架由PLA材料的3D打印设备和风扇控制的开源开发板制成。该控制程序可以模拟随机风速,并通过自编程记录PWM信号。PWM值也是判断风速变化趋势的重要参考指标;
虽然本文提出的方法从理论上估算了风速,但仍有许多导致误差的因素有待进一步改进。复杂的环境和不断变化的气流条件将会影响最终的计算结果。同时,还需要进一步的研究,通过更有效的统计方法来消除错误的计算点。
实验数据
«——【·参考文献·】——»
1.萨默,《一种用于监测和控制动物建筑空气动力学测量的超声波风速计的计算机程序》,2011。
2.博布鲁茨基,《自然通风下太阳能温室微气候特征分析》,2021。
3.韩迪,《利用超声波传感器的指向性角制作的二维超声波风速仪》,1999。