文 | 中史华纳
编辑 | 中史华纳
水下机器人一直以来都是深海探索和海洋科学研究的关键工具,近年来宏观尺度的鞭毛水下机器人成为了这一领域的新宠,因其独特的设计、建模和表征方法而备受瞩目。
这些机器人的设计灵感来源于生物界的鞭毛生物,如海藻和某些微生物,它们以其高度适应不同环境的能力而闻名。
在宏观尺度鞭毛水下机器人的设计中,仿生学起到了关键作用,研究人员借鉴了生物鞭毛的结构和运动原理,将其应用于机器人的设计中, 这些机器人通常由柔性材料制成,具有鞭毛状的附件,可以通过振动或扭曲来产生推进力,从而在水下进行精确的运动。
01
仿生设计和制造
在建模方面,宏观尺度鞭毛水下机器人的复杂动力学行为需要详细的数学和物理模型来描述,这些模型考虑了机器人的形状、材料特性以及外部水流等因素,以预测机器人的运动和稳定性。
通过精确的建模,研究人员能够优化机器人的设计,以实现更高的性能和控制精度。
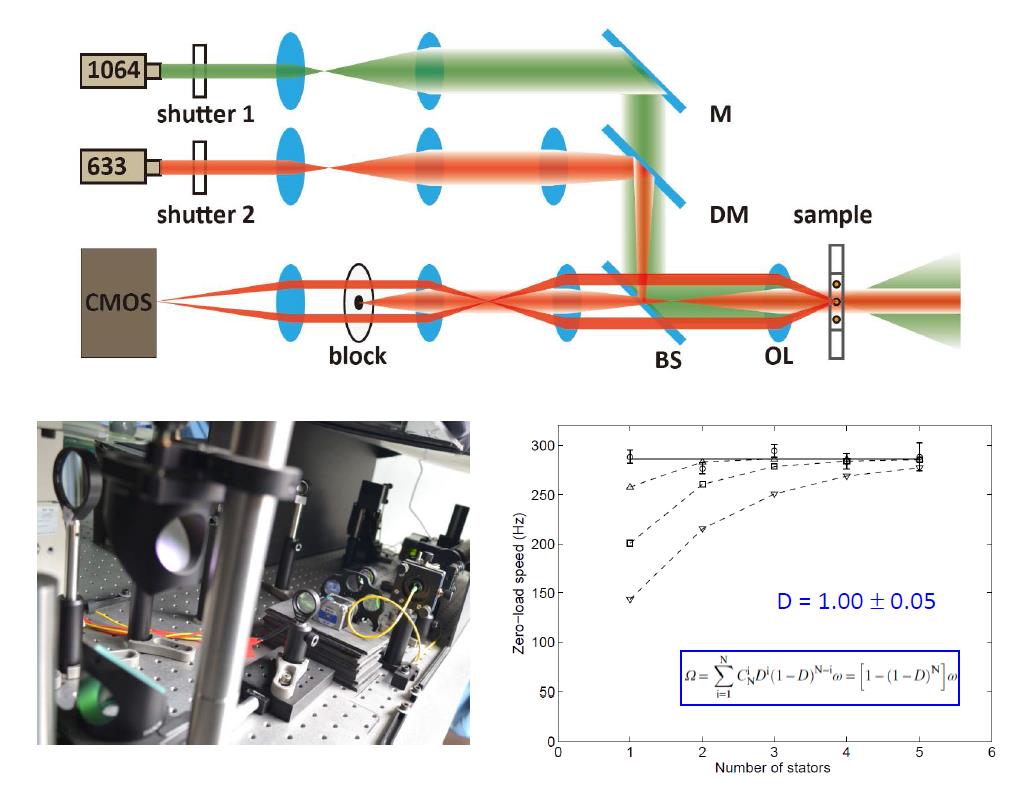
此外,宏观尺度鞭毛水下机器人的表征也是研究的一个重要方面,研究人员使用先进的成像技术和传感器来监测机器人的运动、形状和性能, 这些表征数据有助于验证模型的准确性,并为机器人的控制提供关键信息。
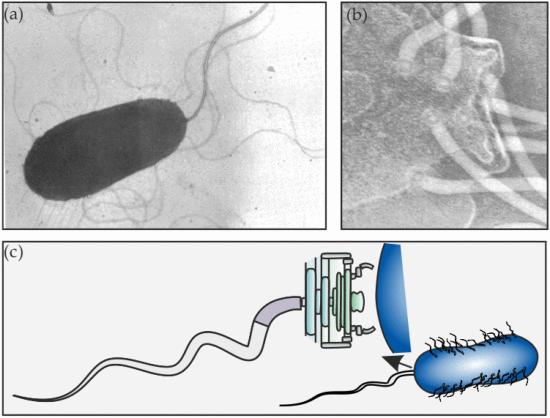
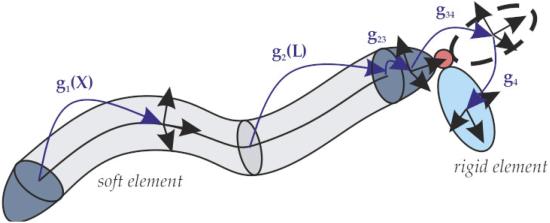
在受到原核单毛细菌的启发下,研究人员设计了一种创新的软推进器,该推进器的设计灵感来自于细菌鞭毛的主要组成部分,并且具备宏观尺寸。
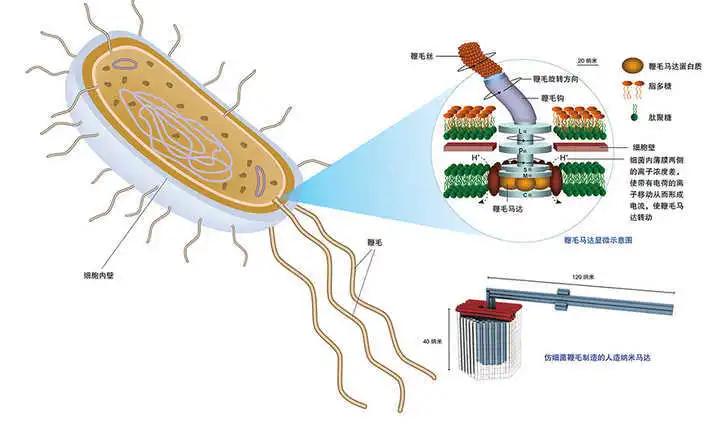
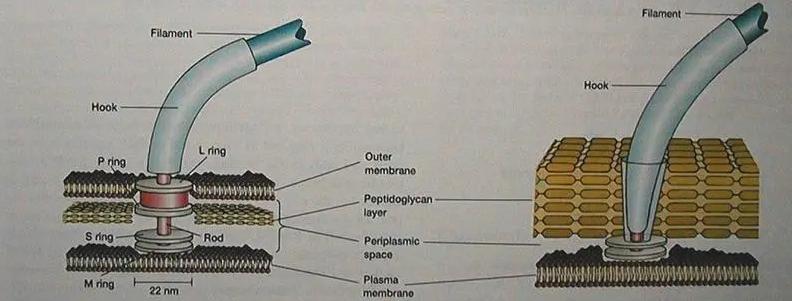
自然界中的鞭毛通常由两个主要部分组成,即钩(位于鞭毛的短近端)和丝(位于鞭毛的长远端),这两者之间由鞭毛马达连接,鞭毛马达将鞭毛与细菌主体相连,并通过旋转钩子将扭矩传递到细丝上。
这种扭矩传递使得鞭毛在周围流体中产生螺旋波,从而推动细菌向前或向后移动,具体方向取决于螺旋波的传播方向。
由于软移动机器人具有可变形的身体或附肢,它们可以通过简单的驱动策略来实现复杂的运动。
在这方面,原核鞭毛提供了一个理想的生物模型, 因为它们可以充分利用钩子和细丝的不同机械特性,这是在鞭毛马达的简单旋转驱动下实现的。
钩子表现出了高抗扭转应变能力,确保了扭矩能够从鞭毛马达传递到细丝上,这两个特性共同创造了多种可能的运动学,这些运动学对于使用均匀结构材料制造的传统鞭毛来说是不可能的。
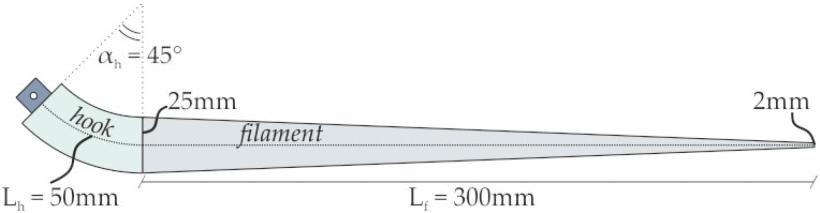
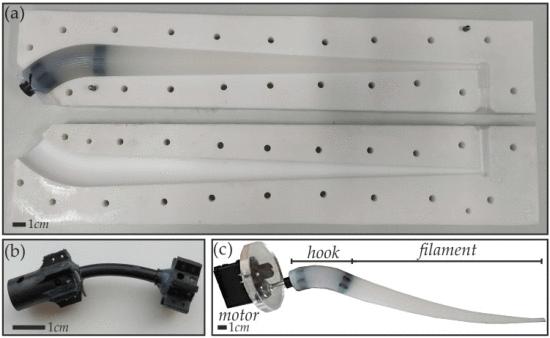
为了研究这种被动结构的响应,最终设计了一种新型螺旋桨,无需预先施加某种螺旋形状的元素,这个螺旋桨的规格包括长度LH=50毫米、预曲率AH=45∘的圆柱形钩子以及长300毫米、直径2至25毫米不等的圆锥形细丝。
这些鞭毛由硅胶制成,而钩子的扭转刚度是通过专门设计并铸造在硅胶内部的ABS骨架来实现的。
硅胶在真空脱气后被注入特氟龙模具中,这些模具通过CNC加工制造,由于采用了聚四氟乙烯制造的模具, 因此无需使用脱模剂,大大简化了铸造过程,在注射之前,3D打印的钩子骨架被插入到模具中。
不同的参数和变量会影响这一装置的净推进推力,这些参数包括用于制造鞭毛的材料密度、运动频率和流体粘度。
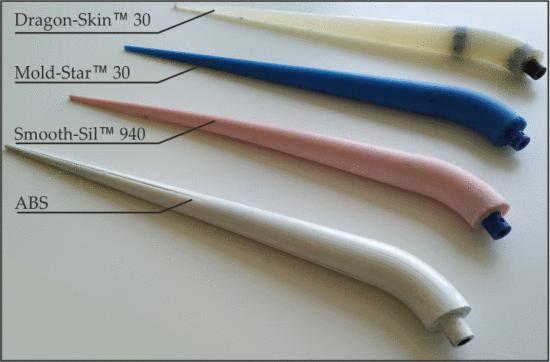
本研究主要关注于在改变螺旋桨的变形形状时可以获得的不同性能,即螺旋波,螺旋波是通过改变材料刚度和电机转速而实现的,研究使用了三种不同的有机硅材料来制造鞭毛模块,这些材料都来自于Smooth-Sil™。
为了进行比较研究,还使用ABS制造了刚性鞭毛,以探究使用不允许出现细丝螺旋波的材料能够达到的行为。
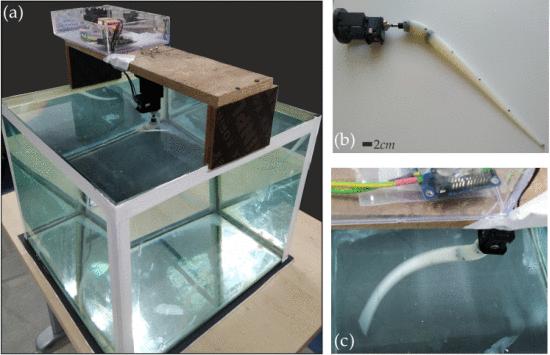
专门设计的不锈钢轴用于连接钩子的主干和ROBOTIS的MX28-AT Dynamixel伺服电机,MX28-AT相对于其他类似的伺服电机具有优势, 因为它可以以轮模式控制螺旋桨,并保持预定义的恒定转速。
电机被安装在防水容器中,并由Arbotix-M Robocontroller进行控制,这是一款专为Dynamixel执行器制造的Arduino兼容微控制器,这个控制器和电机都由11.1V、2200mAh的锂聚合物电池供电,并且还使用了两个XBee 1mW线性天线来启动电机旋转并连续跟踪驱动速度。
02
软鞭毛和单鞭毛的实验测试
为了研究软螺旋桨的阻力和升力系数,研究人员发现传统的刚性鞭毛的经验公式不再适用,软螺旋桨在电机旋转时会与周围流体相互作用,并变形成螺旋状,这个过程受到多个参数的影响,包括材料的刚度和电机的转速。
研究人员在受控环境中进行了静态实验, 其中电机保持静止,他们捕捉了弹性丝的运动学响应,以了解其对电机旋转和周围流体相互作用的反应。
需要注意的是,这是对高度耦合的流固耦合问题的简化处理,实验涉及到了两个系数,即升力系数CL和阻力系数CD,这些系数通过评估实验期间螺旋桨的变形形状而获得,每个软鞭毛被垂直固定在一个500×500 mm²的水箱中,电机连接到一个固定的支撑单元。
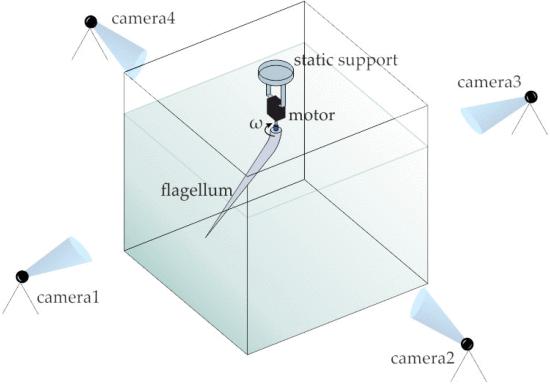
在每个实验中,电机以固定速度(顺时针和逆时针方向)旋转了1分钟,为了记录整个实验过程,研究人员在水箱两侧放置了四个摄像机。
六个标记被绘制在软模块上,其中两个位于钩子内部,四个沿着细丝,为了获取标记的三维空间位置,直线变换算法被应用在实验期间,同时进行相机校准,在视频处理过程中,对每一帧进行处理,以检测六个标记的位置,这些标记形成了电机一个完整周期的轨迹。
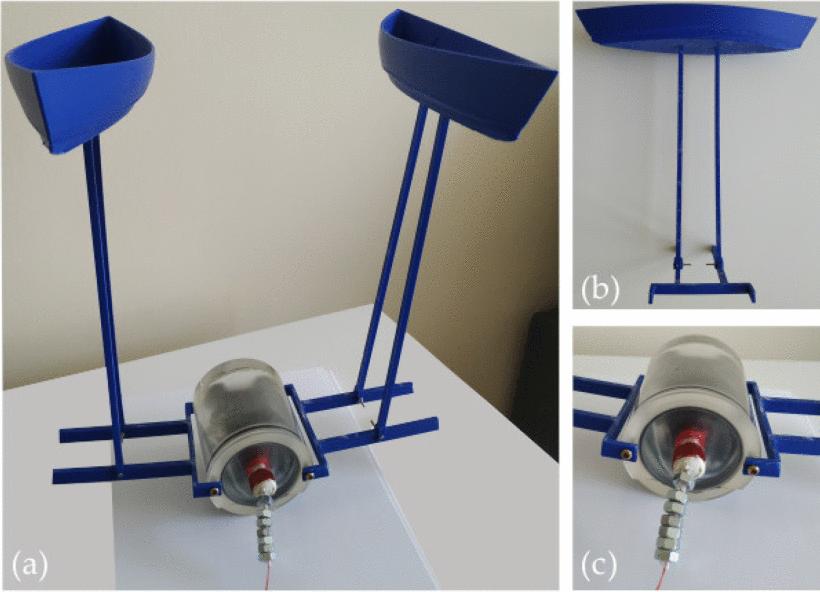
研究团队进行了两个实验来初步评估模块的游泳能力,在第一组试验中,他们成功让原型机在联姻装置中自行推进,这些结果对验证理论预测的准确性和评估模块的推进能力至关重要,这也证实了从软鞭毛到刚性鞭毛时推力方向会反转的预测。
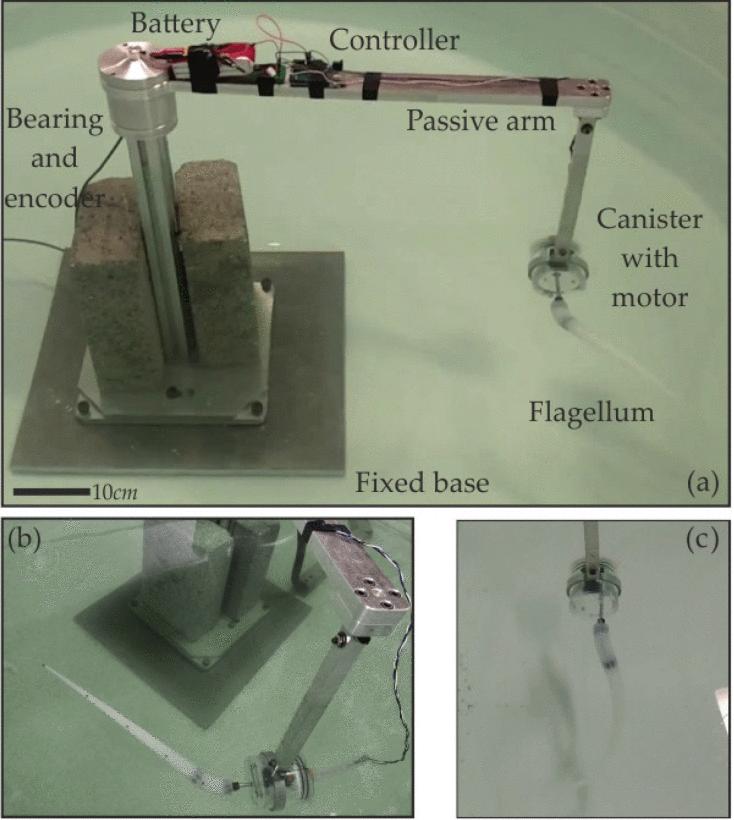
在第二次试验中,研究团队设计并制造了一个由单个鞭毛模块组成的机器人原型,在这些试验中,鞭毛模块受到旋转木马装置中的被动固定支架的约束。
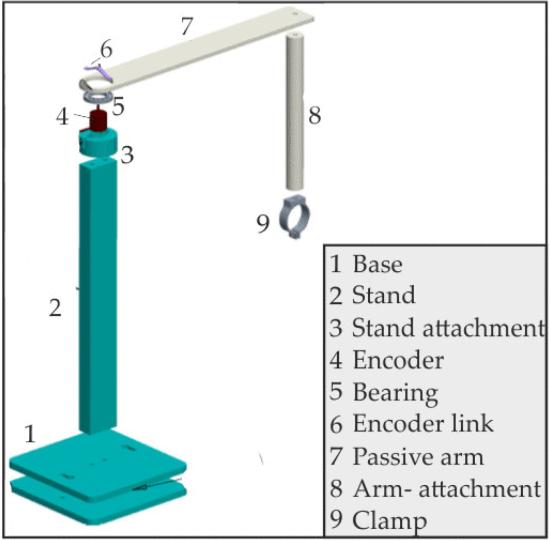
通过一夹具,包含驱动电机的防水罐被被动臂固定,而被动臂则连接到包含1024 P/R(正交)旋转编码器的固定支架上,以确保被动臂无摩擦旋转的轴承也被使用了。
Arbotix-M Robocontroller 和用于控制电机并为其供电的锂聚合物电池被放置在被动臂的顶部,螺旋波产生的推力沿着被动臂绕固定支架的旋转进行传递。
连接到笔记本电脑的Arduino Mega,旋转编码器用于读取旋转速度,并将鞭毛模块的推进能力与其材料刚度以及致动电机提供的速度联系起来。
在试验期间,四个摄像机位于水箱外部的两侧,用于记录整个实验,六个标记分布在软模块上,其中两个位于钩子内部,四个沿着灯丝。
直线变换算法,实验期间获取了标记的空间位置,并经过相机校准后,对视频进行处理以检测每帧中六个标记的位置, 这些标记构成了电机一个完整周期的轨迹,这些实验为评估模块的性能提供了重要的数据。
03
鞭毛虫车
设计、制造和测试了一辆完全不受束缚的车辆,该车辆配备了四个鞭毛,为容纳电机、电池和所有必需的电子元件,车辆采用了铝制外壳设计。
外壳分为两个细长的圆顶,每个圆顶的直径为180毫米,使用橡胶O形圈和螺钉将其连接起来,总长度为210毫米。
第一个圆顶包含一个ABS 3D打印结构,用于支撑四个电机,这些电机通过使用O形圈密封的4毫米孔连接到外壳外的鞭毛模块。
第二个圆顶内部包含了Arbotix-M机器人控制器和锂聚合物电池,电池被置于固定在圆顶墙壁上的3D打印ABS盒子内,以保护电子元件在车辆运动时不受损坏。
磁性传感器连接到Arbotix-M Robocontroller,用于启动电机旋转,一些重物被放置在车辆内,以抵消浮力,确保车辆在水中保持垂直的静止位置。
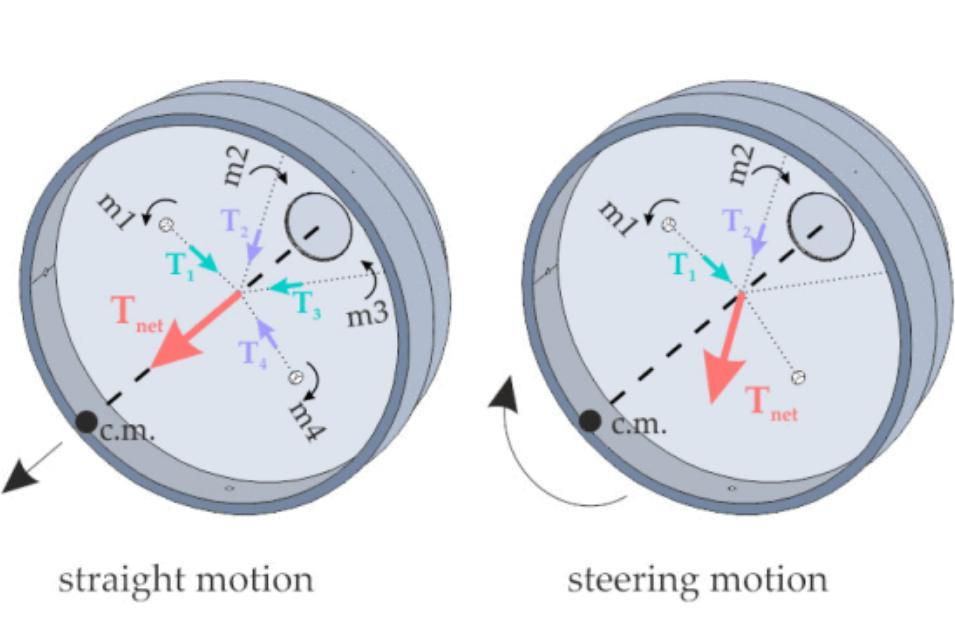
车辆上的四个电机的位置经过精心分析,以获得最大的推力并且防止鞭毛之间发生纠缠,它们的位置布局类似于四旋翼系统上的螺旋桨配置,倾斜角相对于圆顶的中心线为45度,鞭毛相对地呈现出180度的相移,并以交替方向旋转,从而使平面外反作用力矩自动抵消。
研究中使用的理论模型首先用于估计车辆的性能,并研究电机速度以实现不同的游泳模式,该模型随后被扩展以考虑四个螺旋桨的存在, 并建模表示外壳的几何形状及其所包含的重量的刚体。
特别重要的是,为了准确模拟重心和浮力中心之间的距离,必须精确计算壳内质量的分布,在所考虑的情况下,包括外壳惯性、电池及其外壳、Arbotix-M Robocontroller、用于平衡水中结构的重量以及四个电机及其固定结构在内的中罐的总惯性矩阵已被计算。
这样整个飞行器的质心位于其几何中心,同时也是浮力中心,确保了系统的稳定性并防止了意外的旋转。
04
直线运动和转向运动
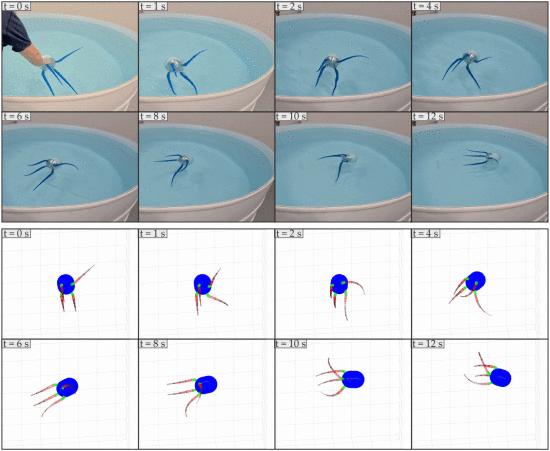
为了实现直线运动,研究团队对四个电机进行了模拟测试,以最大速度进行交替方向旋转,模拟结果显示了在不同时间点的快照,并将其与相同规格的实际实验结果进行了比较。
在时间=0时,初始配置显示了两个模块处于直线位置,而另外两个模块呈现出180度的相位差,电机开始以交替方向旋转,从而实现了直线运动,在经过13秒后,机器人游过了70厘米的距离,平均游泳速度为5.38厘米/秒。
原型机的功耗主要与电机的功耗有关,约为22瓦特,模拟和实验的完整视频可在附加材料中找到, 所提出的理论模型被证明是一个有效的工具,用于研究螺旋桨和飞行器的不同设计和几何形状的行为。

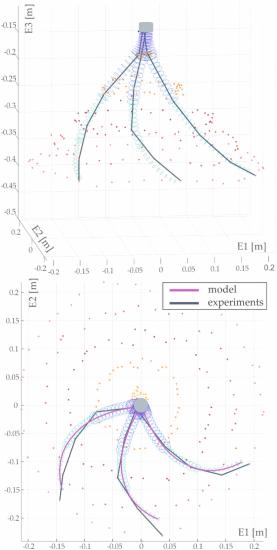
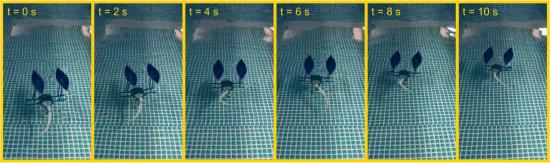
采用四旋翼系统的飞行控制方法,为了实现转向运动,两个电机以最大速度交替方向运行,而另外两个电机则保持静止。
由于质心相对于鞭毛位于前方,因此飞行器在两个旋转螺旋桨的一侧开始旋转,模型和实际原型表现出非常相似的行为,直到完成90度的旋转。
当模型车辆继续以类似圆形的轨迹旋转时,真实车辆呈现出类似椭圆形的轨迹,这种差异是由于飞行器具有轻微的负浮力,并且实验是在相对较小的水箱中进行的,鞭毛刷在水箱底部。
未来的研究将专注于改进车辆的设计,并在实际水池中进行实验,该原型代表了使用鞭毛模块作为推进源的多种解决方案之一的第一个示例,通过优化模块的位置、数量、材料和设计,可以实现不同的设计和结果,有望提高机器人的整体性能。