2017-06-26 刘强译 浮空飞行器
Y. Shoji, H. Fuke, K. Hamada, I. Iijima, C. Ikeda, N. Izutsu, Y. Kakehashi, Y. Matsuzaka,
T. Sato, M. Tamura and T. Yoshida
Institute for Space and Astronautical Science
Japan Aerospace Exploration Agency
Sagamihara, Kanagawa, 252-5210, Japan
1yshoji@mech.eng.osaka-u.ac.jp
2fuke.hideyuki@jaxa.jp
摘要:
半个多世纪以来,平流层气球在全世界广泛地应用于各种科研任务。然而,随着合适的降落地点的减少,气球飞行试验面临着安全问题。与降落于地面不同,降落并在海面回收是解决这个问题的一个激进的方法。科学气球的海上搜索和回收并不多见,但是,日本却独自发展这种方法长达40多年。本文根据实际试验案例,描述气球和吊舱的海上搜救和回收方法。
一、 简介
半个多世纪以来,平流层气球在全世界广泛地应用于各种科研任务,并对空间科学的进步作出了贡献。关于高空气球,一个吸引人的特点是其搜索与回收。当完成任务后,平流层气球的科学载荷舱通过降落伞从平流层降落到地面后被回收。通过回收,科学家可以很容易地获取大量观测数据,而不需要通过无线传输。有些设备回收后,还可以应用于其他的飞行试验,这样可以降低飞行试验的成本。
许多气球在地球表面实施降落和回收。然而,随着航空业的发展,地球表面适合气球降落和回收的区域正在减少。气球技术的一个优点是,能够以较低的成本搭载大质量的载荷。有的载荷质量可以达到一吨以上。此外,有些气球的囊体可重达几百千克,然而气球不能够自己驱动达到安全的降落点。因此,野外和人口密度较低的地方,才是适合气球降落回收的安全区域。另外,随着人口增长以及城郊的扩张,适合气球降落回收的区域面积和数量在逐渐减少。图1是世界人口密度图,该图来自“联合国2015年3月版世界人口密度分布图”,由哥伦比亚大学国际地球科学信息网络中心发布。图中光亮区域是比较适合气球降落和回收的区域。然而,由于地形陡峭、密林覆盖、远离城区等原因,这些区域比较难以接近。
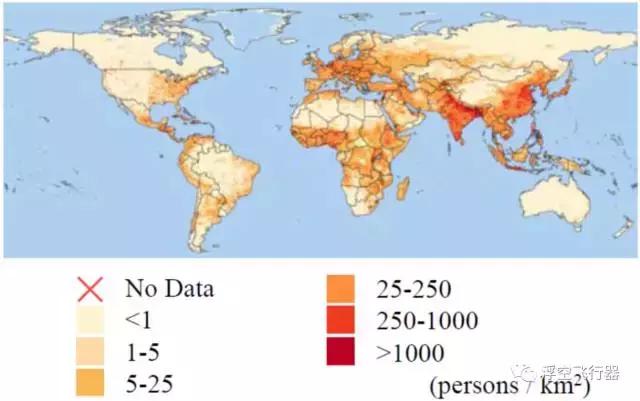
图1. 2015年世界人口密度(哥伦比亚大学,国际地球科学信息网络中心,2016)
近期,为了确保安全和可持续性,开始了海上降落和回收气球方法的研究。虽然海上搜索和回收不普遍,但是日本已经研究了很多年。在1950年代至1960年代,日本发放的气球大多数降落在地面,然而,在1960年代后期,日本就已经计划让一个载荷更大的气球降落在海面(Minagawa, 1966)。在1970年代,随着载荷质量的增大,海上回收的需求迅速增加。在1974年,许多气球和载荷被引导到海面降落和回收,以避开发放场地附近日益繁忙的航线(Nishimura, 1974)。日本在气球海上降落和回收技术方面投入了大量的研究,在1970年代末,海面已经成为了日本高空科学气球降落与回收的主要区域(Nishimura, 1979),时至今日,相关技术有了进一步发展。结果是,日本的气球科研工作者在气球海上搜索和回收方面,积累了40多年独特的经验和理解。
本文基于日本平流层气球海上搜索与回收的经验和知识,阐述其具体的方法。文章第二部分讲述海上回收与地面回收的区别,文章第三部分通过一个案例分析介绍海上搜索与回收的操作方法,第四部分是对这个案例的总结。
二、 海上回收与地面回收的不同点
2.1 环境
2.1.1 漂浮的必要性
海上回收与地面回收最大的不同点在于海上回收需要气球和载荷在海面漂浮。只有浮力大于重力的物体才可以漂浮于海面,而任务物体都可以在地面停留而不需要额外的设备支撑。一旦载荷沉入海中,搜索和回收工作将变得更加艰难。因此,使载荷能够漂浮于海面的浮力设计,是海上回收技术中最重要的内容。
气球吊舱可以固定在漂浮装置上,然而,气球囊体漂浮就比较困难。许多日本制造的气球囊体在海中溅落后仍能漂浮在海面。气球囊体在降落过程中会包裹一定的空气,由于气球囊体密度降低,例如一个10万立方米体积的气球囊体质量大约为300 kg,气球囊体可以在自身浮力支持下在平静的海面漂浮一段时间。然而,气球囊体包裹的空气会在强波浪作用下流失,因此,回收海上回收气球囊体需要回收人员在气球溅落后快速抵达。
2.1.2 漂流
另外一个不同点是漂流。有效载荷和气球囊体在海面随风和海浪漂流,可以比地面更加容易移动。有效载荷和气球囊体可以在一天之内漂流几十千米的距离,如图2所示(Toriumi et al., 2003)。因此,在诸如国界线或者渔网密布等受限区域附近,气球降落点需要仔细选择。
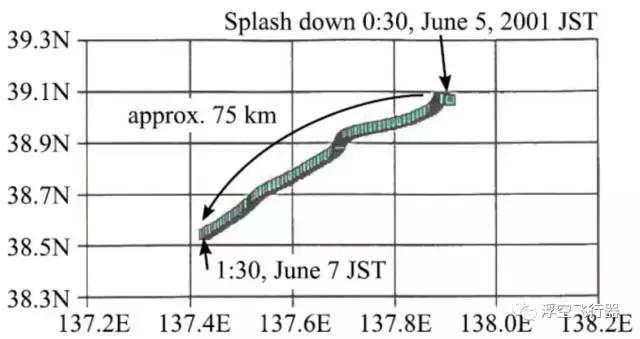
图2. 某吊舱49.5小时漂流轨迹 (Toriumi et al., 2003)(文章作者翻译).
如上所述,气球囊体可以在平静的海面漂浮一段时间,但是在波浪较大的海面会很快失去浮力而下沉。一旦沉入水中,囊体将随水下洋流漂流,使回收变得异常困难。气球囊体需要非常敏捷地搜索和回收。
2.1.3 波动和翻滚
在降落地拆解吊舱,是地面回收的常用方法。然而,在海面,就地拆解吊舱将面临更大的困难和危险。吊舱在海面将随波浪运动,这降低了拆解的可操作性。吊舱的抓取点有时会在水面下方,当回收人员接近吊舱时,吊舱会失去平衡而翻滚。比较好的方案是,当吊舱还在水面时只做比较安全的操作,当吊舱转移至地面或者大船较稳定的甲板上时再做比较精细的操作。
2.2 电和化学条件
2.2.1 电环境的缺点
海水是导电液体。飞控系统的导线和能源管理需要小心地设计。海水的电阻率比纯净水小很多,因此,通过海水可以长距离传导较大的电流。如果在水面以下,一对蓄电池的电极从电池包装盒中裸露出来,则电池会持续放电直至电量放完或者电流通路破坏。
2.2.2 腐蚀
海水会导致金属材料电化学腐蚀。电流通路的连接点会由于电化学作用而腐蚀。当于电路板连接时,含有导电的金属成分的吊舱结构或设备盒子可以作为地线或者机架地线。两种距离很近的不同金属材料,在海水中浸没时也可以形成一个小型的电池,电池产生的微量电流可以对金属材料产生电化学腐蚀。需要重复使用的设备,应该有合适的海水隔离设计。
三、 案例研究
本章节将用一个案例,介绍日本的气球飞行系统海上回收方法。
3.1 周边环境
在此,我们介绍回收的周边环境,尤其是气球的海上搜索与回收的周边环境。本章节介绍的气球回收案例是在大树町气球发放场(Taiki Aerospace Research Field, TARF)附近的海域实施的,TARF是日本宇航局(Japan Aerospace Exploration Agency, JAXA)在日本北海道建设的气球发放基地。关于TARF的概要性介绍,请见参考文献 Fuke, 2010。海上搜索和回收区域的地图如图3所示,该区域位于太平洋的西北岸,在TARF的东侧。海上搜救基地港口是在靠近TARF海岸的大树町港口(Taiki port),正常情况下,我们租借渔船作为海上搜救和回收船。海上搜救和回收区域沿海岸线10 NM(18 km)远、长10 NM(18 km)、宽10 NM(18 km)。为了保障安全,我们避免让气球坠落在离海岸线18 km以内的水域,因为这个区域是海上渔业区域,渔船和渔网密布。该区域的东部边界是根据国内法律对船只航行界线所确定的,其北部和南部边界是根据该船只的航行半径确定的。当发放较大的气球而渔船不能承担搜救和回收任务时,我们就从其他的港口租借更大的船只。这是针对靠近TARF海域的搜救和回收,当选择其他地方为搜索和回收区域时,就需要选择合适的港口和船只了。
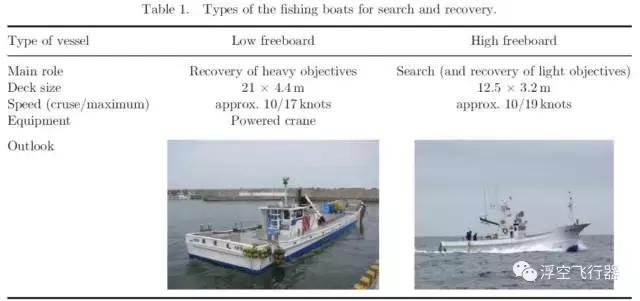
大树町港口有两种渔船可以承担气球海上搜救和回收任务,其具体性能参数见表1。一种是低干舷船,该船配有一台吊车。低干舷使得从甲板上可以方便地接触海面漂浮物,因此,这种船通常用于打捞较大的物体。另一艘是*干高**舷船,主要用于执行搜索任务,当回收物体较小时,该船也可以用于打捞。两种船的巡航速度大约是20 km/h,可以在2.5小时之内抵达搜索和回收区域的任意地点。此外,当天气条件满足目视飞行规则 (Visual flight rules,VFR)时,还可以使用直升机协助搜索和回收。TARF可供直升飞机停靠和加油。
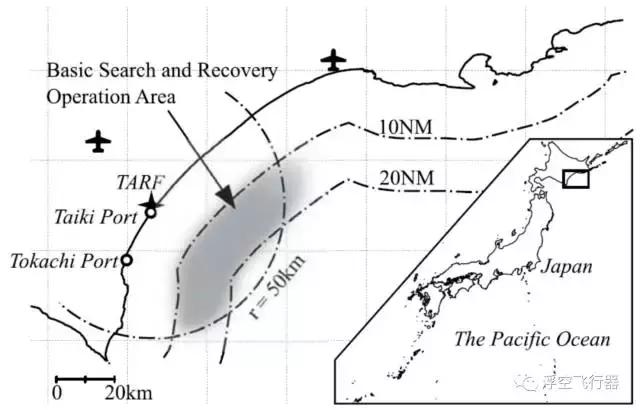
图3. 海上回收区域地图
如上所述,气球海上搜索和回收区域,位于太平洋西北岸的优良渔业区内,因此,这里有许多渔船,不仅限于大树町港口,还有其他港口的渔船。为了确保安全,我们在气球飞行前会通知当地的渔业协会、日本海警以及其他有渔船在回收区域作业的渔业协会。
3.2 策略
气球搜索和回收操作,遵循以下策略,这些策略的制订,是为了确保气球搜索和回收在此区域安全和可持续性最大化。
A. 气球囊体和吊舱,包括不可重复使用的物体,都必须快速回收,以保护自然环境不受污染、海航航行安全、渔业安全以及任务成功。
B. 搜索与回收顺序如下:
1. 搜索吊舱
2. 搜索囊体
3. 回收吊舱
4. 回收囊体
囊体和吊舱定位,是搜索的第一步。一旦囊体沉入水中,就会污染海洋,因此,应当在沉入水中之前发现囊体。
C. 根据法律规定,搜索与回收必须在离海岸线20 NM (36 km)范围内实施。
D. 搜索与回收操作,必须在白天完成。
3.3 飞行系统
3.3.1 漂浮
漂浮是吊舱回收最重要的部分,因为漂浮决定了吊舱是否能够被发现以及安全的回收操作。因此,吊舱的漂浮需要仔细设计。
基础的漂浮设计从估计所需的浮力开始,浮力需能够支持吊舱的最大质量。我们的浮力设计准则是“最大质量”,包括压舱物的质量。由于日本气球发放之后很快就会飞临海面,因此,这是一个安全的设计,以防止气球飞行在原计划之前突然中止,而携带大量压舱物坠落海面。于是,当气球飞行正常操作,压舱物都抛掉之后,吊舱坠海时可以有足够的浮力。我们将多余的浮力板称为安全系数。用玻璃纤维胶带将浮力板绑在吊舱上,这种方法可以将吊舱密封,使海水难以进入吊舱内部。最近,有的吊舱利用螺丝将浮力板固定在吊舱框架上。
更好的浮力设计,可以通过合理地安排浮力模块来控制吊舱在海面以上的漂浮高度。为了更加便于吊舱打捞,通常需要设计一个合理的漂浮高度,一个基本的要求是吊舱的抓取点应该在水面以上。吊舱在海面以上的漂浮高度,通过吊舱的重心和在水面以下部分的体心来确定。因此,浮力设计决定了海上回收的可行性。图4是一个携带天文学望远镜的吊舱的浮力设计示例 (Shoji et al., 2012a)。吊舱包含多个质量达几十千克的设备,质量为280 kg的压舱物放置在吊舱底端。压舱物全部抛弃后,吊舱的重心将升高到上部分。图4中,红色部分是浮力模块,并标示了其浮力值和体心位置。浮力模块用于支持吊舱上端、中段、底端的质量。因此,与吊舱一半漂浮于水面相比,这种设计可以产生两倍的浮力。
挑选合适的浮力材料也很重要。通常地,有许多聚苯乙烯泡沫可供选择。我们经常选择膨胀聚苯乙烯泡沫 (Expanded polystyrene, EPS),膨胀聚苯乙烯泡沫密度为25 kg/m3,1 m3膨胀聚苯乙烯泡沫可以提供975 kg的浮力。日本使用这些泡沫作为吊舱浮力模块,已经有很长时间了。然而,如果需要采用其他塑料泡沫板时,则需要仔细的核查相关性能指标。浮力材料的强度,是另一个很重要的参数。浮力材料在承受溅落冲击和漂流时波浪的冲击时,不能破损。吊舱利用降落伞以5-7 m/s速度溅落时,溅落冲击载荷可高达25 G以上。
我们推荐使用的材料常用于医疗产业重物缓冲垫等,在气球技术中也性能很好。由于强度和刚度取决于形状,因此块状最受欢迎。利用玻璃纤维胶带加强浮力模块,是防止破损的有效途径。
由于微观结构的作用,有些塑料泡沫在低气压下会膨胀,在高气压下会压缩。这种材料在平流层环境中会变形而丧失浮力,因此不能用作吊舱的浮力模块。浮力对海上搜索和回收非常重要,因此,在采用一种新的浮力材料之前,需要做彻底的调研。
在后续章节会介绍空气密封箱或者水密封箱,用作浮力模块的一部分。虽然,这种盒子在水下可以产生浮力,但是,必须考虑到渗漏的问题。同样地,空气囊可以成为很好的浮力模块,如阿波罗计划中航天舱再入大气时采用的那样,阿婆罗计划航天舱飞行过程中空气囊很小,抵达水面之后膨胀而产生巨大的浮力。但是,渗漏的风险仍然存在,更有甚者,空气囊比固态浮力模块更容易破损。气球的一个优势就是对吊舱尺寸限制不是很严格,因此,我们决定采用固态浮力模块,以独立地保障安全。
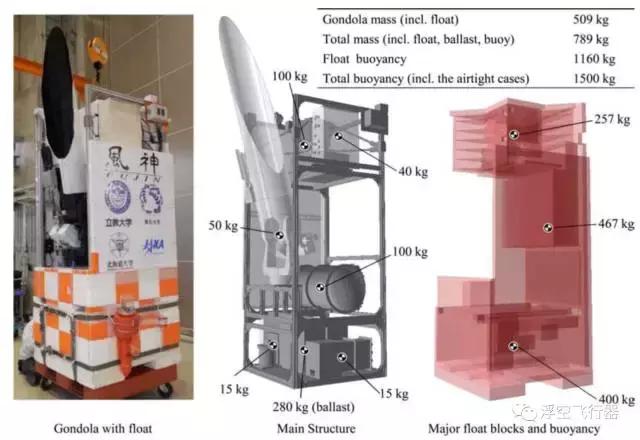
图4. 某吊舱的浮力模块设置(红色部分)
3.3.2 防水箱
空气密封箱通常用于保持搭载设备周边的大气压力,也是在海水中保护设备的好方案。另外一个可行的方案是采用防水箱,防水箱可以方便地采购。一些没有高压防护的箱子在坠入海里后可能会吸入海水。在低温下,箱子的橡胶密封圈可能会收缩和变硬,导致空气渗漏。当箱子抵达海面后,温暖的空气使箱子橡胶密封圈膨胀和变软,而此时箱子内部是负压,这将降低箱子的防水性。利用高压水测试防水箱的密闭性很有用。
3.3.3 起吊挂钩点
吊舱通过回收船上的吊车起吊回收。吊舱抓取点与吊车挂钩之间的连接通常很方便,但是吊舱抓取点有时会位于水面以下。因此,应在吊舱上设置额外的抓取点,当吊舱在水面倒置漂浮时可以通过额外的抓取点起吊回收吊舱。在吊舱上设置大一点的抓取环会很有帮助。
3.3.4 吊舱外观
为了控制太阳辐射对吊舱温度的影响,许多吊舱外观通常是白色。在天气晴好的状态下搜索时,吊舱的白色对比反差很大,在海面很远的距离或者空中就可以发现吊舱。然而,在较差的天气条件下,例如有着白色浪头的波浪较大的区域,或者大雾区域,纯白的吊舱将混杂在环境中,丧失了可见性。将吊舱喷涂为橙色等较为鲜艳的颜色,是提高吊舱可见性的好办法。将吊舱喷涂为不与环境混杂的几何图案,也是一个很好的方法,见图5。
另一个提高可见性的方法是使用海上救援标志,即将较为鲜艳的荧光颜料分散于海水中,以改变海面的颜色。海上救援标志广泛地应用于水体流动研究和海洋打捞,因此,有许多商业产品可供选购。使用海上救援标志需注意以下事项:海上救援标志分散在海面,提高了从天空向下看的可见效能高,飞机支援搜索效果会非常好;几个小时后,由于波浪和潮汐的作用,海上救援标志的密度就会降低。气球飞行、搜索、第一艘回收船抵达等操作,须在气球溅落后的几小时内完成。
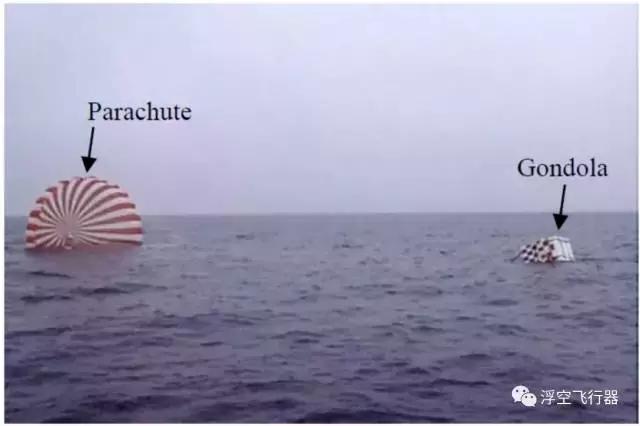
图5. 海面上的降落伞(左)与橙-白相间的吊舱(右)
3.3.5 定位浮标
定位浮标是给漂流的吊舱定位的关键设备,我们研发了可在海上远距离定位吊舱的设备。从1990年*开代**始利用GPS和NOAA/ARGOS(Nishimura, 1998)研发,到2001年进入实际应用阶段(Toriumi et al., 2003)。定位浮标一直在改进和完善中,现在,我们的定位浮标使用GPS和铱星卫星通信系统(Shoji et al., 2012b)。
铱星定位浮标包含一个GPS接收机和铱星数据传输器。定位浮标识别器坐标,然后将其坐标信息传输给气球发放基地,传输频率采用最常用的设置,每5分钟一次。在良好的传输条件下,5分钟内,坐标信息可通过铱星网络传输给气球发放基地。铱星定位浮标系统比传统浮标系统的优势在于其不需要特殊地面站。遥测信号可以通过网络传输,还可以远程操控浮标更改采样频率。
目前,我们使用三种型号的铱星定位浮标。一种是基本的球形浮标,如图6所示,这是Zeni Lite Buoy公司的商品。搜索船将球形浮标送至并绑在吊舱上,在不能立即实施回收操作时,可以在气球基地对吊舱位置实施远程监控。球形浮标包含一个锂电池和太阳能电池,以保障长时间持续运行。
另一种定位浮标是气球飞行定位浮标,是国内气球飞行的标配,如图7所示。气球飞行定位浮标可在下启海平面上至平流层空间工作,并以5分钟每次的频率报告吊舱经纬度和海拔高度数据。气球飞行定位浮标尺寸大约为Ф220×750 mm,质量约5.8 kg。浮标通过绳索与吊舱表面连接,在溅落时利用*破爆**索切割而与气球分离。浮标通过另外一根场5 m的绳索与吊舱连接,无论吊舱漂浮高度如何,浮标的天线会永远在水面以上。在常用报告频率下,气球飞行定位浮标可以持续工作10天以上,飞行浮标报告频率可以通过远程调控而更改,在更低的报告频率下浮标持续工作时间更长。
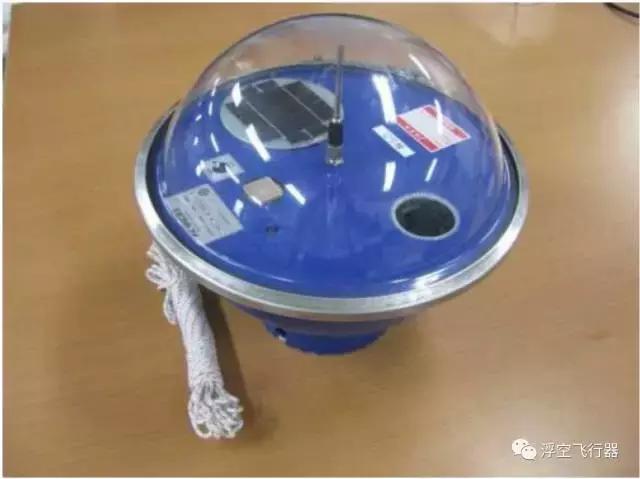
图6. 球形定位浮标
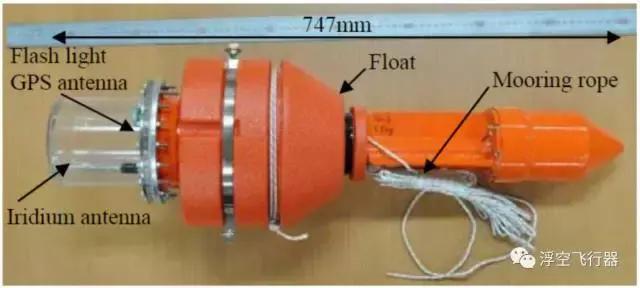
图7. 铱星飞行定位浮标
第三种型号是微小型定位浮标,如图9所示。该浮标是基于标准飞行定位浮标而新近研发的,长为400mm,重量1.5 kg。其功能有所简化,由于主体采用聚碳酸酯制造,与采用铝制造的标准浮标相比,其重量要轻很多。当以5分钟每次的频率报告其方位信息时,这种定位浮标可持续工作2.5天,与前述两种定位浮标一样,通过降低报告频率,可以延长使用时间。
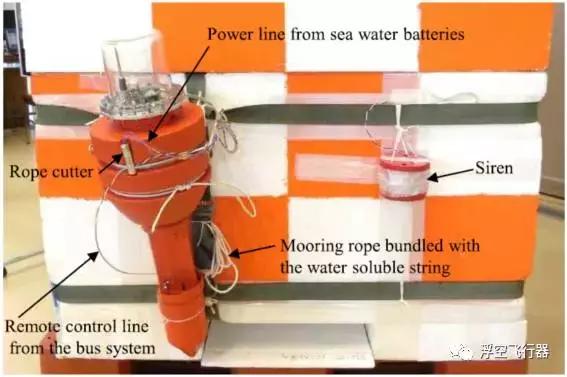
图8. 用于飞行的铱星定位浮标固定在吊舱上
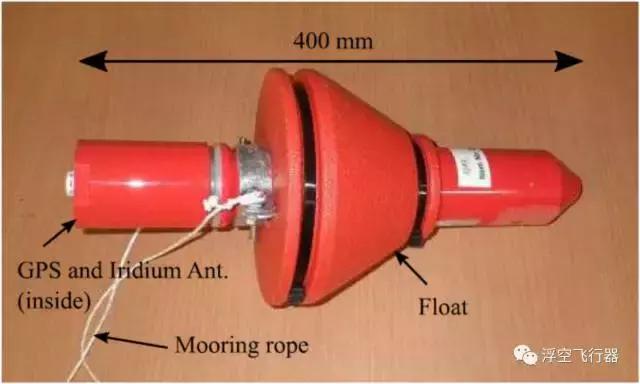
图9. 微型铱星定位浮标
3.3.6 无线电导航台
在利用卫星通信的定位浮标之前,使用的是无线电导航定位浮标。当有效载荷溅落之后,无线电导航定位浮标开始发射无线电信号给气球搜索船和发放基地。由于无线电导航定位浮标的有效距离只在视距范围之内,因此,该浮标被现有的新技术所取代。但是,在一些新定位浮标不适用的情况下,例如,有效载荷的尺寸、质量以及气动外形的限制等,就常常使用无线电导航定位浮标。当搜索和回收海域无法接入互联网时,也可以使用无线电导航定位浮标。
3.3.7 闪烁灯
为了提高夜晚的可视性,也可以在吊舱上安装闪烁灯。虽然溅落地点是远离海岸、水面交通稀少的地方,但是吊舱有可能漂流到海岸附近。由于渔业操作在海岸附近区域,水面交融较为拥挤,尤其是晚上更加拥挤。因此,在晚上确保较好的可视性,对吊舱和水面交通安全很重要。
3.3.8 报警器
气球溅落点通常选在远离人烟稠密的区域,由于选定的区域没有严格戒严,船只还是有可能在此出没。如图8所示,一个报警器安装在吊舱上,以对贸然闯入的船只发出警报。
3.3.9 海水电池
海水电池用于引爆绳索切割器,以切割定位浮标与吊舱之间的连接绳。海水电池包含一个伏打电池,当在海水中浸没时,海水电池可以产生大约1W的电能,以引爆绳索切割器。作为冗余设计,我们在每个吊舱上安装两个海水电池,在溅落过程中,海水电池将沉入水中。
3.3.10 水溶线
让物体与吊舱分离的另一个办法,是利用水溶线。水溶线在干燥条件下像棉线一样,入水就会溶解。水溶线是一种很好的材料,不像绳索切割器那样需要电池、水探测器以及能量转换设备等额外的功能。另一方面,水溶线没有尼龙材料制作的绳索强度高。水溶线适合系质量较轻的物体,例如做一个连接环,将定位浮标绑到吊舱上。
3.3.11 基于重复使用的设计
可回收吊舱设计的一个原则是,按照可重复利用性对设备进行分类放置。如3.2节所述,涉及到大型气球的所有部件,都需要回收。由于海水的腐蚀,暴露于空气的飞行系统通常不能重复利用,而海水密封箱内的设备通常可以重复利用。当需要做多次飞行试验以及海上回收时,气球系统中需暴露于环境的部件,通常选择低成本、易获取的材料制造。如图4所示,携带天文望远镜的吊舱,将特殊和昂贵的光学设备防止在空气密封箱内。另一方面,望远镜的镜筒和安装底座不需要防水,因此选择市场上已有的商品,在下次试验时,可以方便地替换。
3.4 操作
3.4.1 组织和操作顺序
一个搜索和回收组包含三艘渔船和一架直升机,表2归纳了搜索和回收组的基本构成及其功能。渔船属于大树町港口,渔船操作人员是当地的渔民,他们对附近海域及相关操作非常熟悉。能轻易接触水面的低干舷船,用于回收吊舱和囊体。回收吊舱的船上,配备有熟悉任务的科学家,科学家可以及时地做出关于吊舱状态和操作的决定。*干高**舷船用于吊舱和囊体的搜索。船的用途可以根据回收物体而调整。直升机主要用于搜索囊体,如3.4.3节所述,囊体的搜索比吊舱更难。直升机的速度和高视野可以为搜索船提供强有力的支持。在直升机上安装悬挂吊环后,直升机还可以作为载荷运输机将有效载荷运输至TARF。
回收组所有成员都TARF指导。指导信息主要通过铱星电话(如表2所示的IrTEL)短信发送至搜索与回收船。由于操作环境噪声巨大,基于文字的信息交流是一个比较可靠的方式。
不能配备铱星定位浮标的气球囊体回收船,可以携带球形铱星定位浮标(如表2所示的IrB)。吊舱回收船也携带铱星*位器定**(IrL),铱星*位器定**不能漂浮于海面,但是仍然可以起到铱星定位浮标的作用。在抵达回收物体之前,回收船上的*位器定**持续地发送船的位置,这对船只在搜索和回收区域的导航非常有帮助。与吊舱绑定一个飞行定位浮标不同,吊舱回收船上配备了铱星*位器定**。
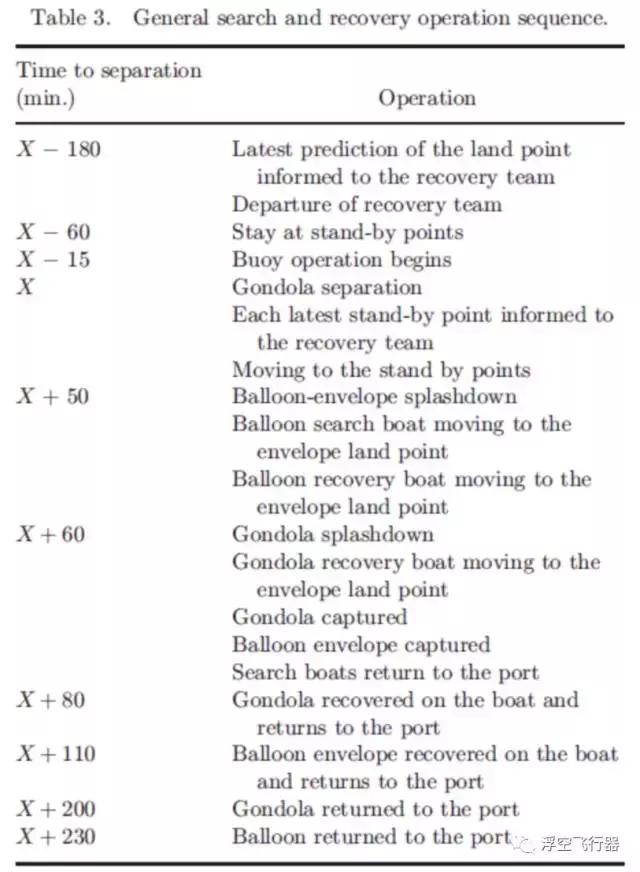
表3是一个常规的搜索和回收操作时序表,X是指飞行终止的时间。由于搜索船抵达搜索区域(图3所示)最远的预备降落点需要2个多小时,因此搜索操作在终止飞行前3个小时就开始了。回收船在TARF指导下,于飞行终止时刻出发。搜索和回收技术发展至今,溅落后,回收船初次抵达物体的平均时间在15分钟之内,回收的平均时间是60分钟。过去十年,搜索时间显著低降低了。这在很大程度上应归功于铱星*位器定**,即使在浓密的大雾天气,铱星*位器定**仍然可以准确地将船只引导至吊舱。
3.4.2 载荷回收流程
吊舱回收从接近降落伞开始,在靠近和回收过程中需将螺旋桨关闭。飞行系统上的线和带子等有一定的危险性,它们有可能卷入螺旋桨和转轴里。降落伞利用一个长杆勾起来,长杆与甲板勾连,之后用人力将降落伞拖到甲板上,并存储在甲板下面(如图10所示)。之后,回收人员将挂钩放在吊舱上面(如图11所示),将吊舱抓取点勾住,吊起吊舱(如图12所示),然后拖到甲板上。剩余的辅助设备,例如定位浮标等也要回收。当吊舱固定在甲板上之后,返回港口之前,最后的操作是保障安全的操作,例如关掉系统电源、拆除被海水浸湿的初级电池等。这样一个常规的回收操作,从最初抵达降落伞到完成安全操作,大约需要十分钟。
接近降落伞之后,我们在降落伞内部放置一个浮力大于降落伞重力的浮力模块,这样降落伞就不会沉入水底。否则,一旦降落伞沉入水底,就很难打捞。
在这个过程中,当起吊和降落吊舱时,需要额外小心。当起吊数百公斤的吊舱时,回收船的滚转和颠簸,会严重地导致吊舱摇摆。滚转和颠簸运动幅度取决与回收船的大小,通常地,为了保障安全,我们限制波动的高度在2 m以下。

图10. 回收降落伞

图11. 接近吊舱

图12. 回收吊舱
3.4.3 回收气球囊体流程
回收气球囊体的流程与吊舱相同。但是,气球囊体通常在飞行终止时破裂,然后在降落过程中纠缠在一起。搜索和回收气球囊体比吊舱更难。
在日本,气球囊体降落点预测通常基于GPS信号以及来自TARF的无线信号追踪。搜索和回收船被引导至气球囊体的预测落点,如果气球囊体反射回收船发射的无线电波,气球囊体在溅落之前就有可能被探测到。直升机对于海上搜索气球囊体也很有帮助,气球囊体溅落后,不可能平展地漂浮于海面(如图13所示),因而降低了气球囊体的可视性。气球囊体在海面延展,因此,从天空向下搜索的视角非常好。在这种情况下,直升机将气球囊体的落点位置报告给TARF和回收船,之后就在气球囊体落点附近盘旋直到回收船抵达。回收船从上风头靠近气球囊体,之后关闭螺旋桨。靠近气球囊体应比靠近吊舱更加小心,因为部分气球囊体有可能在水下延展,这样很容易绞到螺旋桨上。

图13. 初次抵达体积30万立方米气球的囊体

图14. 体积为1.5万立方米气球的气囊漂浮在海上(直升机拍照)
打捞囊体的方法取决于囊体大小。较小的囊体,譬如体积小于1.5万立方米的囊体,可以用手打捞。体积更大的囊体,需要使用吊车打捞。图15所示是利用回收船吊车打捞气球囊体的流程,首先,利用吊车将部分囊体吊起来并拖拽到回收船甲板(图15.a),拖拽上来的囊体放在一个吊环上面(图15.b),之后用吊环将囊体兜起(图15.c),然后将囊体从吊环中逐渐拖拽到甲板上(图15.d),直至囊体完全回收。
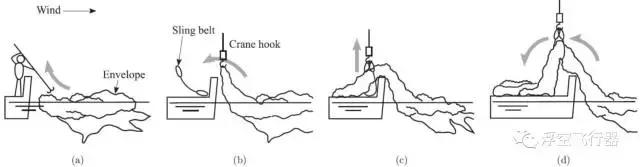
图15. 囊体回收流程

图16. 回收1.5万立方米囊体的渔船
如果是回收体积更大的囊体,则需要租借配备有吊车的船,如图17所示。虽然吊车更大,但是回收流程几乎完全一样。

图17. 回收体积30万立方米囊体的船
四、 总结
本文阐述了平流层气球的海上搜索和回收方法。地上回收和海上回收有诸多不同点,本文基于日本气球技术操作经验,介绍了应对这些不同点的方法。我们期望平流层气球海上搜索与回收技术能有进一步的发展,气球飞行能有更多的机会,以为科学研究作进一步的贡献。
五、 致谢
铱星飞行定位浮标和铱星微型定位仪的研发,得到了Zeni Lite Buoy公司的有力支持。北海道大树町气球海上搜索和回收,得到了大树町渔业互助协会以及大树町政府密切的合作和周到的支持。我们再次谨对所有相关人员表示最诚挚的感谢。
参考文献:
1、Center for International Earth Science Information Network (CIESIN), Columbia University [2016] \Gridded population of the world, version 4 (GPWv4): Population density adjusted to march 2015 revision of UN WPP country totals," http:// dx.doi.org/10.7927/H4HX19NJ, Accessed Sep. 9, 2016.
2、Fuke, H. [2010] Adv. Space Res. 45, 490.
3、Minagawa, O. [1966] \Report on the 4th balloon campaign in 1966," in Balloon Symposium, 28 November 1966, Vol. 1966 (Inst. Space Astronaut. Sci. Tokyo), pp. 22–30 (In Japanese).
4、Nishimura, J. [1974] \Report on the balloon campaigns in 1974," in Balloon Symposium, 12 December 1974, Vol. 1974 (Inst. Space Astronaut. Sci. Tokyo), pp. 1–8 (In Japanese).
5、Nishimura, J. [1979] \Report on the balloon campaigns in 1979," in Balloon Symposium, 17 December 1979, Vol. 1979 (Inst. Space Astronaut. Sci. Tokyo), pp. 1–9 (In Japanese).
Nishimura, J. [1998] Adv. Space Res. 21, 931.
6、Shoji Y. et al., [2012a] \A balloon-borne telescope for planetary observations," 39th COSPAR Scientific assembly, PSB.1- 0032-12.
7、Shoji Y. et al., [2012b] \The new positioning buoy for sea recovery operations in japan," 39th COSPAR Scientific Assembly, PSB.1-0039-12.
8、Toriumi M. et al., [2003] \GPS Argos System," in The Institute of Space and Astronautically Science Report SP, Vol. 45 (Inst. Space Astronaut. Sci.), pp. 11–22 (In Japanese).